ρ=100,1ρ[дБ]. (4.9)
Потужність шуму квантування
виражається через величину кроку квантування ![]() a
[1 - 7]:
a
[1 - 7]:
![]() 2кв=(
2кв=(![]() a)2/12.
(4.10)
a)2/12.
(4.10)
Крок квантування залежить від
числа рівнів квантування ![]() :
:
![]() a=(amax-amin)/(L-1).
(4.11)
a=(amax-amin)/(L-1).
(4.11)
Тут передбачається, що первинний сигнал a(t), який підлягає перетворенню в цифровий сигнал, приймає значення від amin до amax і на інтервалі (amln, amax) підлягає квантуванню. Для сигналів із середнім значенням, що дорівнює нулю amin=- amax. Якщо значення amax не задане, то воно визначається за допомогою співвідношення
amax=Пa![]() ,
(4.12)
,
(4.12)
де Па – пік-фактор, який характеризує перевищення максимальним(амплітудним) значенням сигналу його середньоквадратичного значення (кореня із середньої потужності сигналу).
На основі співвідношень (4.10) і (4.11) мінімально можливечисло рівнів квантування визначається як
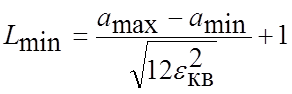 .
(4.13)
.
(4.13)
Значність двійкового примітивного коду на виході АЦП
k= log2L (4.14)
єціле число. Тому число рівнів квантування L вибирається яктакий цілий ступіньчисла 2, при якому
L![]() Lmin.
(4.15)
Lmin.
(4.15)
Для визначення припустимої імовірності помилки двійкового символу на вході ЦАП Pб необхідно попередньо визначити припустиму величину потужності шуму хибних імпульсів на основі співвідношення (4.6):
![]() 2х.і.=σ2ε-
2х.і.=σ2ε-![]() 2кв,
(4.16)
2кв,
(4.16)
де потужність шуму квантування ![]() 2кв обумовлена співвідношеннями (4.10) і (4.11)
при відповідному числі рівнів квантування L. Далі скористаємося
співвідношенням [1 - 7], що зв'язує
2кв обумовлена співвідношеннями (4.10) і (4.11)
при відповідному числі рівнів квантування L. Далі скористаємося
співвідношенням [1 - 7], що зв'язує ![]() 2х.і.
та імовірність помилки біта на вході ЦАП Pб:
2х.і.
та імовірність помилки біта на вході ЦАП Pб:
 ,
(4.17)
,
(4.17)
де величина крокуквантування
![]() визначається формулою (4.11).
визначається формулою (4.11).
Співвідношення (4.17) дозволяє
розрахувати припустиму ймовірність помилки символу ![]() на
вході ЦАП.
на
вході ЦАП.
Тривалість двійкового символу (біту) на виході АЦП визначається як
Тб =Тд/k.(4.18)
4.3 Характеристики модему маніпульованих сигналів
У цифрових системах зв'язку для передачі інформації по радіоканалу використовуються різні методи дискретної модуляції (маніпуляції) гармонічного носія: двійкова амплітудна маніпуляція (АМ-2), двійкова фазова маніпуляція (ФМ-2), двійкова відносна фазова маніпуляція (ВФМ-2), квадратурна відносна фазова маніпуляція (КВФМ), квадратурна відносна фазова маніпуляція зі зсувом (КВФМЗ), двійкова частотна маніпуляція (ЧМ-2), частотна маніпуляція з мінімальним зсувом (ЧММЗ), багаторівневі частотна (ЧМ-М), фазова (ФМ-М), відносна фазова (ВФМ-М) та амплітудно-фазова (АФМ-М) маніпуляції.
Функціональні схеми модуляторів та демодуляторів (детекторів) маніпульованих сигналів, а також часові діаграми, що пояснюють принципи їх роботи, докладно описані в [1 - 7].
Під час передачі маніпульованих сигналів мінімально можлива ширина їх спектра визначається межею Найквіста [1 - 7], яка для АМ-M, ФМ-М, ВФМ-M і АФМ-М має вигляд
![]() ,
(4.19)
,
(4.19)
а для ЧМ-М -
![]() , (4.20)
, (4.20)
де
![]() - тривалість двійкового символу на вході модулятора;
- тривалість двійкового символу на вході модулятора;
М— число позицій сигналу.
Завадостійкість
демодулятора цифрової системи зв’язку визначають імовірністю помилки двійкового
символу ![]() (у випадку двійкової маніпуляції) або
імовірністю помилки елемента маніпульованого сигналу
(у випадку двійкової маніпуляції) або
імовірністю помилки елемента маніпульованого сигналу ![]() (у
випадку багаторівневої маніпуляції). Імовірності помилок
(у
випадку багаторівневої маніпуляції). Імовірності помилок ![]() і
і ![]() залежать
від методу модуляції, способу прийому, відношення середньої енергії сигналів до
питомої потужності завади та характеристик каналу зв'язку.
залежать
від методу модуляції, способу прийому, відношення середньої енергії сигналів до
питомої потужності завади та характеристик каналу зв'язку.
У
табл. 4.1 наведені формули, які визначають імовірність помилки двійкового
символу під час передачі сигналами з двійковою та багаторівневою маніпуляцією
по гаусовому каналу зв'язку з постійними параметрами [1 - 7]. Для двійкових
сигналів значення ![]() і
і ![]() збігаються.
Перерахунок імовірності помилки елемента модульованого сигналу
збігаються.
Перерахунок імовірності помилки елемента модульованого сигналу ![]() в імовірність помилки двійкового символу
в імовірність помилки двійкового символу ![]() для сигналів з багаторівневою маніпуляцією зроблено в
припущенні, що використовується маніпуляційний код Грея. У всіх формулах
прийняті позначення:
для сигналів з багаторівневою маніпуляцією зроблено в
припущенні, що використовується маніпуляційний код Грея. У всіх формулах
прийняті позначення:
 -
відношення середньої енергії елементів модульованого сигналу, що витрачається
на передачу одного двійкового символу, до питомої потужності шуму;
-
відношення середньої енергії елементів модульованого сигналу, що витрачається
на передачу одного двійкового символу, до питомої потужності шуму;
 (4.21)
(4.21)
- одна з форм інтегралу ймовірності, що називається функцією Крампа, яка табульована в математичних довідниках та наведена додатку А . Для неї також можна користуватися формулою апроксимації
 . (4.22)
. (4.22)
Таблиця 4.1 — Імовірність помилки двійкового символу під час передачі маніпульованими сигналами
|
Спосіб прийому |
Вид маніпуляції |
Імовірність помилки двійкового символу |
|
Когерентний прийом (КП) |
АМ-2 |
|
|
ЧМ-2 |
|
|
|
ФМ-2, ФМ-4 |
|
|
|
ВФМ-2, КВФМ, КВФМЗ, ЧММЗ |
|
|
|
ВФМ-4 |
|
|
|
АФМ-16 |
|
|
|
Некогерентний прийом (НП) |
АМ-2 |
|
|
ВФМ-2 |
|
|
|
ЧМ-2 |
|
|
|
ЧМ-М, |
|
Для
заданого методу маніпуляції та способу прийому необхідно розрахувати та
побудувати графік залежності ![]() =f(
=f(![]() ). Під час побудови графіка масштаб для
). Під час побудови графіка масштаб для ![]() повинен бути логарифмічним, а для значень
повинен бути логарифмічним, а для значень ![]() , що виражені у децибелах (
, що виражені у децибелах (![]() [дБ] = 10 lg
[дБ] = 10 lg![]() )
- лінійним. Під час розрахунків збільшують
)
- лінійним. Під час розрахунків збільшують ![]() з
кроком 1 дБ, починаючи з 2 дБ, до такого значення, коли імовірність
з
кроком 1 дБ, починаючи з 2 дБ, до такого значення, коли імовірність ![]() не виявиться меншою за
не виявиться меншою за ![]() .
Приклад залежності
.
Приклад залежності ![]() =f(
=f(![]() )
для когерентного приймання сигналів з ФМ-2 поданий на рис. 4.3.
)
для когерентного приймання сигналів з ФМ-2 поданий на рис. 4.3.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.