


МЭИ (ТУ)
Лабораторная работа № 1 по ТАУ
«Исследование типовых законов регулирования»
вариант 4
Выполнили студенты А-2-02
Вершинин Д, Боярский А
Проверил преподаватель
Коломейцева М.Б.
2005
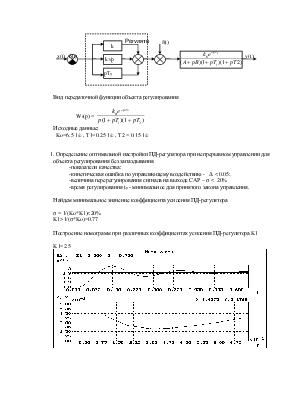
Вид передаточной функции объекта регулирования
W0(p) = 
Исходные данные:
Ko=6.5 1/c , T1=0.25 1/c , T2 = 0.15 1/c
1. Определение оптимальной настройки ПД-регулятора при непрерывном управлении для объекта регулирования без запаздывания.
-показатели качества:
-кинетическая ошибка по управляющему воздействию - Δ < 0.05;
-величина перерегулирования сигнала на выходе САР – σ < 20%
-время регулирования tp - минимальное для принятого закона управления.
Найдем минимальное значение коэффициента усиления ПД-регулятора
σ = 1/(Ko*K1)<20%
K1>1/(σ*Ko)=0.77
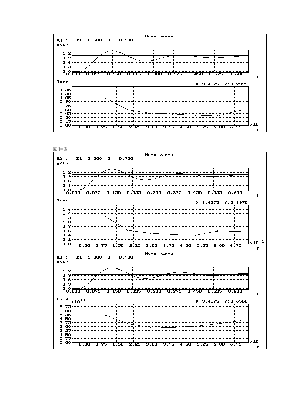
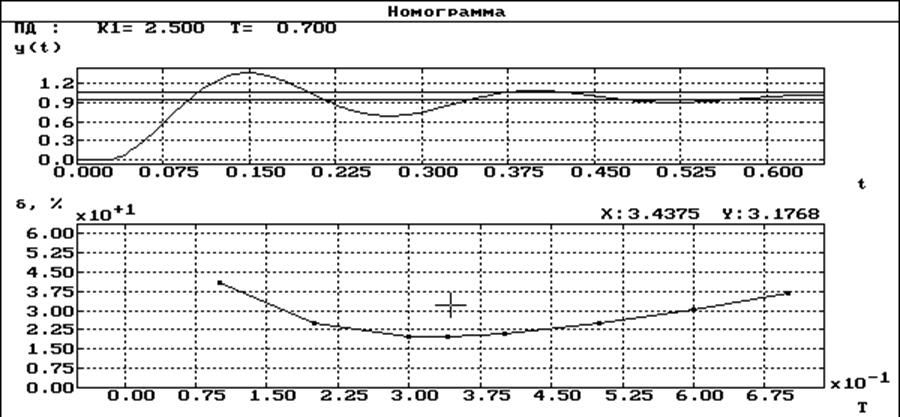
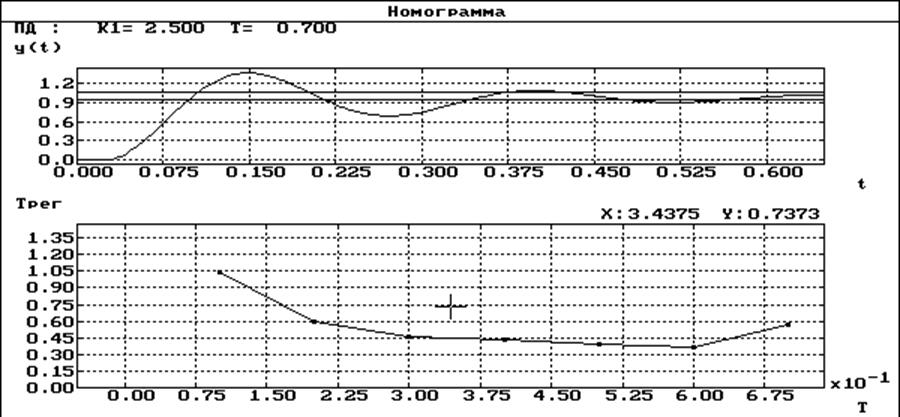
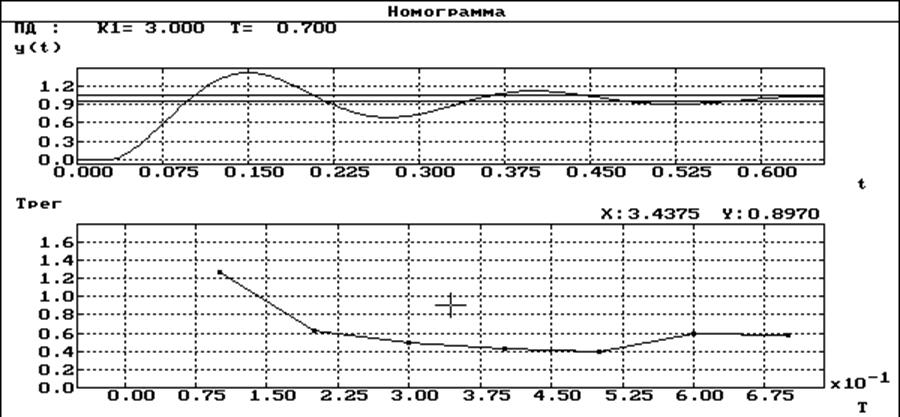
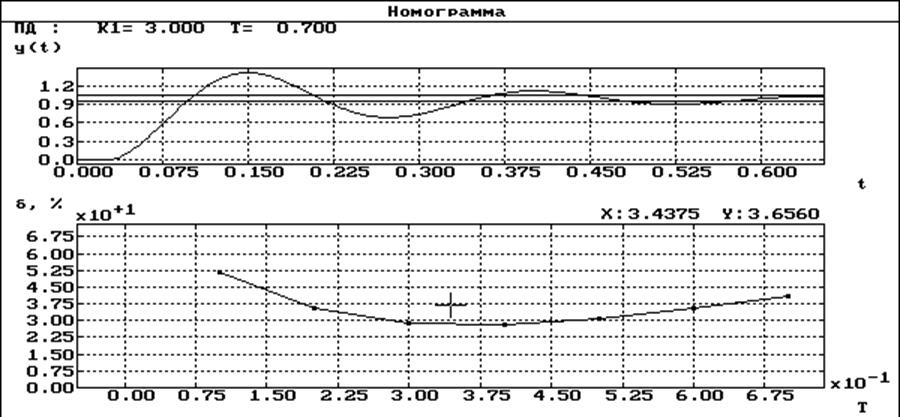
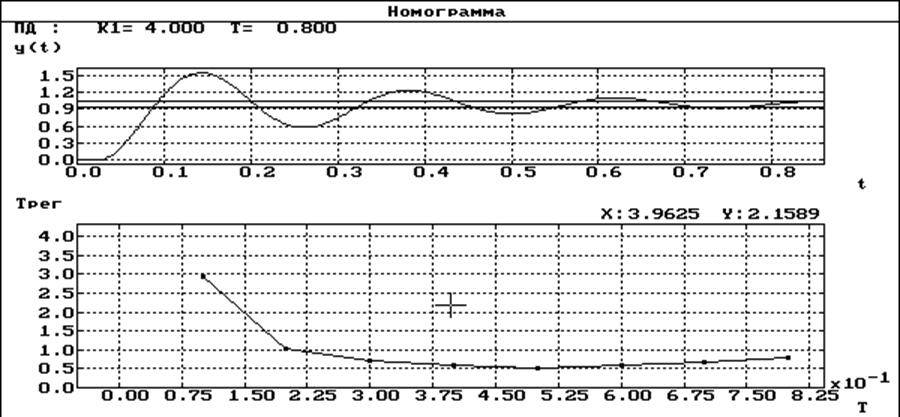
Построение номограмм при различных коэффициентах усиления ПД-регулятора K1
K1=2.5
K1=3
K1=4
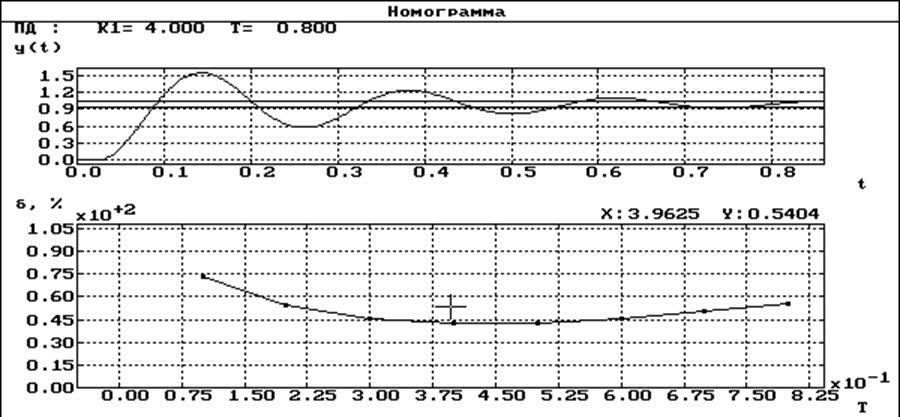
Оптимальная настройка Пд-регулятора такова:
K1=2.5, Tрег=0.33 1/c, σ = 20% , T=0.7 1/c
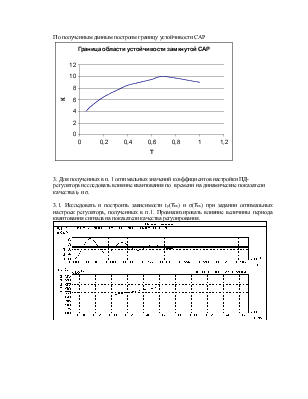
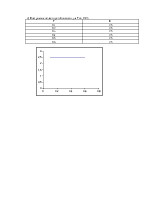
2. Для этого же случая в области параметров настройки регулятора k1 и Т построить путем проведения серии вычислительных экспериментов границу области устойчивости замкнутой САР.
|
Т |
К |
|
0,05 |
4 |
|
0,1 |
5 |
|
0,2 |
6,5 |
|
0,35 |
8,05 |
|
0,4 |
8,5 |
|
0,5 |
9 |
|
0,6 |
9,5 |
|
0,7 |
10 |
|
1 |
9 |
По полученным данным построим границу устойчивости САР
3. Для полученных в п. 1 оптимальных значений коэффициентов настройки ПД-регулятора исследовать влияние квантования по времени на динамические показатели качества tp и σ.
3.1. Исследовать и построить зависимости tp(Ткв) и σ(Ткв) при задании оптимальных настроек регулятора, полученных в п.1. Проанализировать влияние величины периода квантования сигнала на показатели качества регулирования.
При увеличении периода квантования сигнала увеличиваются показатели качества регулирования.
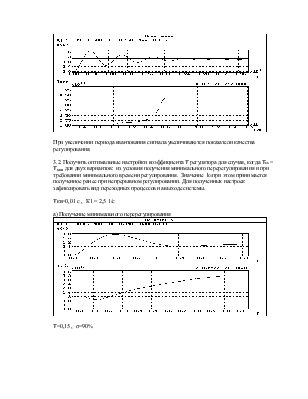
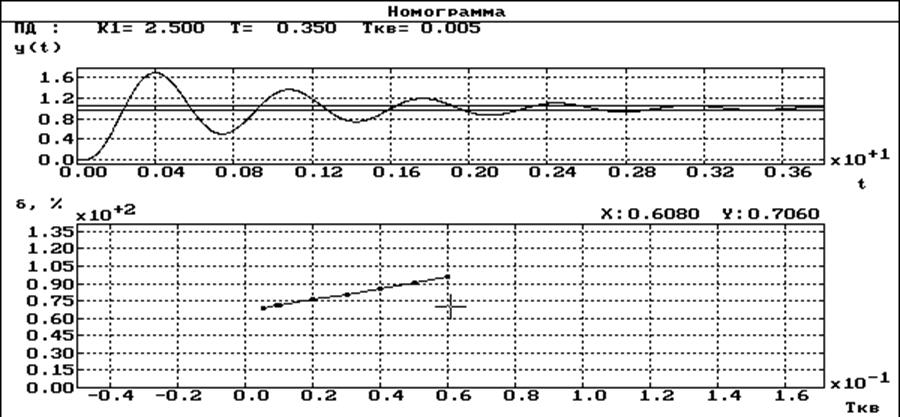
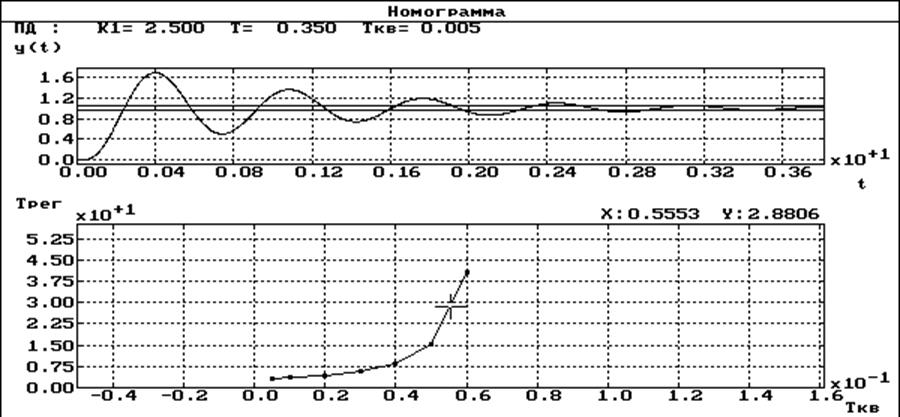
3.2. Получить оптимальные настройки коэффициента Т регулятора для случая, когда Ткв = Тмин для двух вариантов: из условия получения минимального перерегулирования и при требовании минимального времени регулирования. Значение k1 при этом принимается полученное ранее при непрерывном регулировании. Для полученных настроек зафиксировать вид переходных процессов на выходе системы.
Ткв=0,01 с , К1 = 2,5 1/с
а) Получение минимального перерегулирования
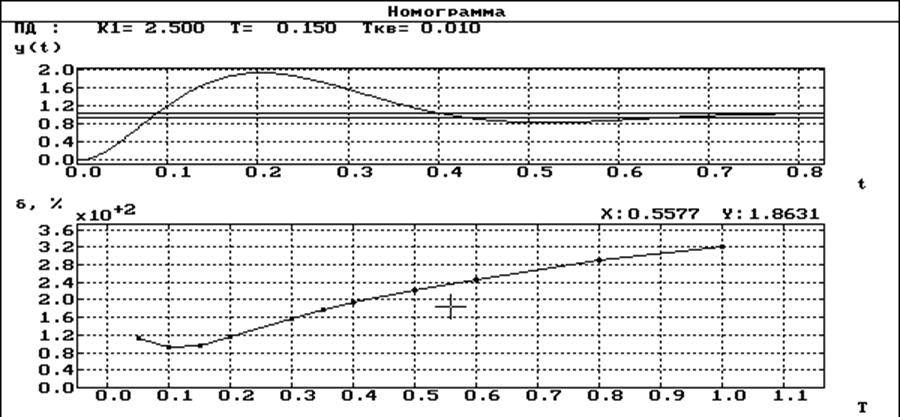
Т=0,15 , σ=90%
б) Получение минимального времени регулирования
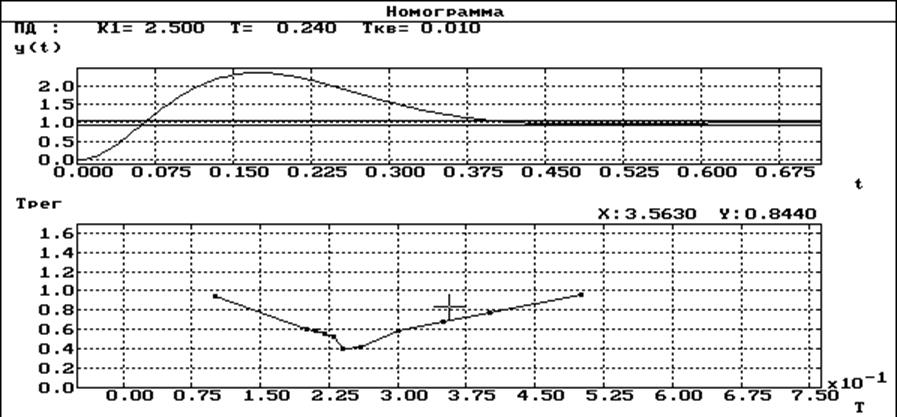
Т=0,35 1/с, Трег =0,4 с
3.3. Исследовать влияние величины периода квантования сигнала на границу области устойчивости системы при изменении параметров настройки k1 и Т. Построить границу области устойчивости для двух значений Ткв, равных наибольшей и наименьшей постоянной времени объекта.
1) Построение области устойчивости для Ткв=0,1
|
Т |
К |
|
0,1 |
2 |
|
0,2 |
2 |
|
0,3 |
2 |
|
0,4 |
2 |
|
0,5 |
2 |
|
0,6 |
2 |
|
0,7 |
2 |
|
0,8 |
2 |
|
10 |
2 |
2) Построение области устойчивости для Ткв=0,05
|
Т |
К |
|
0,1 |
2,5 |
|
0,2 |
2,5 |
|
0,3 |
2,5 |
|
0,4 |
2,5 |
|
0,5 |
2,5 |
|
0,6 |
2,5 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.