|
w |
0 |
1 |
4 |
8 |
12 |
16 |
20 |
24 |
28 |
|||
|
P(w) |
72,864 |
27,086 |
-9,827 |
-4,29783 |
-1,57067 |
-0,64621 |
-0,3024 |
-0,15734 |
-0,08903 |
|||
|
Q(w) |
0 |
-44,663 |
-10,439 |
-0,11511 |
0,66515 |
0,49874 |
0,3274 |
0,21642 |
0,14762 |
|||
|
w |
36 |
40 |
45 |
50 |
55 |
60 |
65 |
70 |
75 |
|||
|
P(w) |
-0,03435 |
-0,02289 |
-0,01449 |
-0,00961 |
-0,00661 |
-0,00469 |
-0,00342 |
-0,00255 |
-0,00194 |
|||
|
Q(w) |
0,0758 |
0,05668 |
0,04072 |
0,03017 |
0,02295 |
0,01784 |
0,01413 |
0,01138 |
0,00929 |
|
|
|
|
|
|
 |
|
|
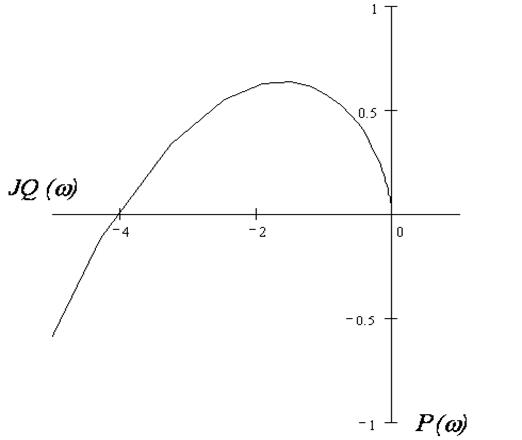
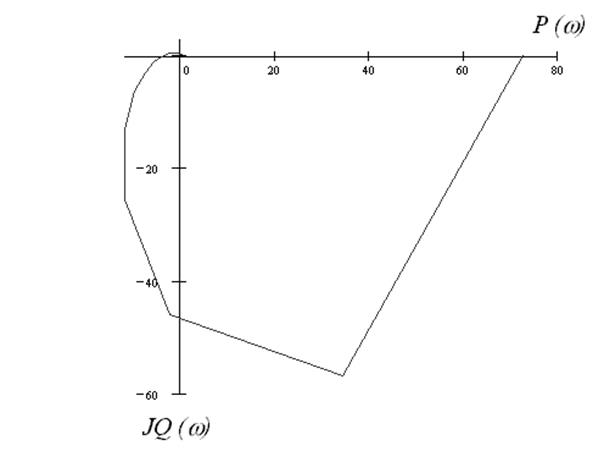
Вывод: система является не устойчивой, так как кривая на рисунках 4 – 5 охватывает точку (-1; j 0) один раз в отрицательном направлении.
2.5 Логарифмический критерий
Записываем передаточную функцию разомкнутой системы:
 ;
;
 .
.
Определим значения сопрягающих частот по формулам (2.2):
 ;
;
 ;
;  .
(2.2)
.
(2.2)
 c-1;
c-1;
 c-1;
c-1;
 c-1.
c-1.
Таблица 2.5 – Данные для построения ЛФЧХ разомкнутой системы
|
w |
j3 |
j4 |
j5 |
j |
|
0 |
0 |
0 |
0 |
0 |
|
1,075 |
-0,78527 |
-0,12829 |
-0,17033 |
-1,0839 |
|
2 |
-1,0775 |
-0,23554 |
-0,3097 |
-1,62274 |
|
3 |
-1,22664 |
-0,34556 |
-0,44752 |
-2,01971 |
|
5 |
-1,35897 |
-0,54042 |
-0,67474 |
-2,57413 |
|
6,25 |
-1,40042 |
-0,6435 |
-0,7854 |
-2,82932 |
|
7 |
-1,41838 |
-0,69866 |
-0,84194 |
-2,95898 |
|
8 |
-1,43719 |
-0,76499 |
-0,90759 |
-3,10977 |
|
8,33 |
-1,44242 |
-0,7852 |
-0,9271 |
-3,15472 |
|
10 |
-1,46368 |
-0,87606 |
-1,0122 |
-3,35194 |
|
25 |
-1,52781 |
-1,24905 |
-1,32582 |
-4,10268 |
Фазочастотная характеристика разомкнутой системы:
суммарная
![]() . (2.3)
. (2.3)
для каждого звена
![]() ;
;
 (2.4)
(2.4)
По данным таблицы 2.5 строим ЛФЧХ разомкнутой системы (графическая часть).
Вывод:система является
статической, т.к. в передаточной функции разомкнутой системы отсутствует
интегрирующее звено. Также система является не устойчивой, т. к. суммарная ЛФЧХ
разомкнутой системы пересекает линию ![]() до частоты среза.
до частоты среза.
|
3 Расчет последовательного корректирующего устройства
Основная задача корректирующего устройства – улучшение точности системы и качества переходного процесса и наряду с этим решить и более общую задачу – сделать систему устойчивой, а затем добиться желаемого качества переходного процесса регулирования. Определение корректирующего устройства происходит по частотному методу с помощью логарифмических частотных характеристик.
Строится ЛАЧХ исходной
некорректированной системы LH![]() (графическая
часть).
(графическая
часть).
В
той же системе строим желаемую ЛАЧХ LC![]() , т. е. характеристику
скорректированной системы (графическая часть).
, т. е. характеристику
скорректированной системы (графическая часть).
Желаемая ЛАЧХ может быть разбита на три участка: низкочастотный, среднечастотный и высокочастотный.
а – низкочастотный участок для
статических систем представляет собой горизонтальную прямую, отстоящую от
оси частот на величину ![]() Дб.
Дб.
б – среднечастотный участок.
Выбираем
значения ![]()
![]()
![]()
![]() по
заданным значения tP
и
по
заданным значения tP
и
![]() из таблицы 3.1.
из таблицы 3.1.
Таблица 3.1
|
|
20% |
25% |
30% |
|
|
7,8 / tP |
10 / tP |
11,5 / tP |
|
|
25 |
20 |
16 |
|
|
67 |
57 |
45 |
|
|
1,08 |
1,2 |
1,28 |
Через частоту ![]() проводим
прямую под наклоном –20 Дб/дек до значения
проводим
прямую под наклоном –20 Дб/дек до значения ![]() Дб
и
Дб
и ![]() Дб. В этих точках прямая меняет свой
наклон для положительного
Дб. В этих точках прямая меняет свой
наклон для положительного ![]() Дб (
Дб (![]() ) на -40 Дб/дек, для отрицательного
) на -40 Дб/дек, для отрицательного
![]() Дб (
Дб (![]() )
на –60Дб/дек. Пряма с наклоном –40Дб/дек проводится до пересечения с прямой
)
на –60Дб/дек. Пряма с наклоном –40Дб/дек проводится до пересечения с прямой ![]() Дб. Наклон соответствующий –60Дб/дек
соответствует в – высокочастотному участку.
Дб. Наклон соответствующий –60Дб/дек
соответствует в – высокочастотному участку.
Путем вычитания ординат исходной ЛАЧХ LH![]() из ординат желаемой ЛАЧХ LC
из ординат желаемой ЛАЧХ LC![]() получаем ЛАЧХ корректирующего эвена
LК
получаем ЛАЧХ корректирующего эвена
LК![]() (графическая часть).
(графическая часть).
![]()
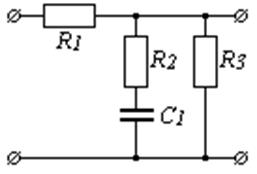
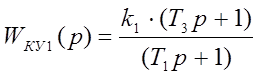
По полученной ЛАЧХ корректирующего звена подбираем наиболее простое по техническому исполнению корректирующее устройство соответствующей формы и вносим эти данные в таблице 3.2.
|
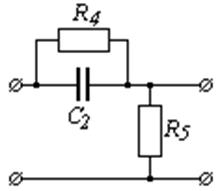
Таблица 3.2- Элементы корректирующего устройства
|
Схема |
Передаточная функция |
Параметры схемы |
|
|
|
R1=18,1 Ом; R2=1 Ом; R3=3,2 Ом; C1=0,93 Ф; k1=k4=0,15. |
|
|
|
R5=0,16 Ом;C2=0,16 Ф; k2=0,1375. |
|
|
|
R7=0,22 Ом; C3=0,12 Ф; k3=0,18. |
|
|
|
|
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.
 ;
; ;
; ;
;  ;
;
 ;
; ;
; ;
; ; R4=1 Ом;
; R4=1 Ом; 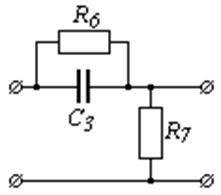
 ;
; ;
; ;
; ; R6=1 Ом;
; R6=1 Ом;