









5.1. Назначение и область применения
Промышленные роботы /ПР/ предназначены заменить человека на участках с опасными и вредными для здоровья условиями труда, а также освободить человека от монотонных и утомительных операций. Кроме того, ПР являются средствами автоматизации, на базе которых могут строиться полностью автоматизированные производства с минимальным участием человека.
ПР могут работать в составе различного оборудования и выполнять как основные, так и вспомогательные операции. Пример основных операций: окраска и нанесение покрытий, сварка, сборка. Пример вспомогательных операций: загрузка оборудования и его разгрузка /в частности, металлорежущего, кузнечно-прессового, литейного и т.п./, выполнение контрольных операций, транспортно-складские операции.
5.2. Основные определения
Наиболее общее понятие - манипулятор /М/. Это устройство, предназначенное для имитации двигательных и рабочих функций руки человека и управляемое оператором или действующее автоматически. Управление манипулятором может быть:
- биотехническим /ручным/, когда оператор
манипулирует рукоятками,
а схват манипулятора повторяет все движения в следящем режиме;
- интерактивным /смешанным/, когда последовательно переходят от ручного режима в автоматический режим управления и обратно;
- автоматическим, когда манипулятор управляется автоматически по заложенной в него программе.
Автооператор /А/ - неперепрограммируемый автоматический манипулятор. Программа в такое устройство закладывается один раз на стадии изготовления, сборки и отладки в виде кулачков, упоров или другой форме, а затем устройство работает по этой программе весь свой срок службы. Примером автооператора может служить механизм автоматической смены инструмента на многоцелевом станке, который каждый раз при смене инструмента повторяет одни и те же движения.
Промышленный робот /ПР/ - перепрограммируемый автоматический манипулятор.
Системы и комплексы, автоматизированные с помощью роботов, принято называть роботизированными. Например, роботизированный технологический комплекс /РТК/. Роботизированные системы и комплексы, в которых робот выполняет основные операции, называет робототехническим.
5.3. Технические показатели промышленных роботов
Здесь приводятся технические показатели ПР, которые в достаточной степени характеризуют технические и технологические возможности ПР и используются при анализе и выборе нужной модели ПР для определениях условий работы.
1/ Степень универсальности. Универсальные - для выполнения различных технологических операций и вспомогательных переходов при функционировании с различными группами моделей технологического оборудования. Специализированные - для выполнения технологических операций одного вида или вспомогательных переходов при функционировании с определённой группой моделей технологического оборудования /например, для токарных станков различных моделей/. Специальные - для выполнения технологических или вспомогательных переходов при выполнении с конкретной моделью.
2/ Грузоподъёмность - наибольшая масса объектов манипулирования, которые могут перемещаться рукой при заданных условиях /при максимально допустимых для данного робота скоростях и ускорениях/. Подразделяются: сверхлёгкие - до 1 кг; лёгкие - от 1 до 10 кг; средние -от 10 до 200 кг; тяжёлые - от 200 до 1000 кг.
3/ Мобильность - возможность передвижения ПР. Подразделяются на стационарные - и подвижные, причём по способу установки разделяются на напольные, подвесные и встроенные. Подвижные напольные ПР могут быть рельсовые или безрельсовые, причём безрельсовые по способу управления подразделяются: с механическим направляющим роликом, фотооптические, индуктивные и радиоуправляемые. Подвижные подвесные ПР могут быть монорельсового типа или мостовые.
5/ Количество манипуляторов. В большинстве случаях ПР имеет всего один манипулятор /одна рука/.Однако в зависимости от назначения существуют ПР с двумя и более манипуляторами.
5/ Число степеней подвижности - сумма возможных движений объекта манипулирования относительно опорной системы /основания/. Движение схвата на зажим и разжим детали в число степеней подвижности не входит. Роботы с малой подвижностью /до трёх степеней подвижности/ имеют упрощенную конструкцию, но их технологические возможности ограничены. Роботы средней подвижности /до шести степеней подвижности/ большей частью относятся к специализированным и универсальным роботам с широкими технологическими возможностями. Роботы с высокой подвижностью /выше шести степеней подвижности/ используются относительно редко из-за сложности конструкции.
|
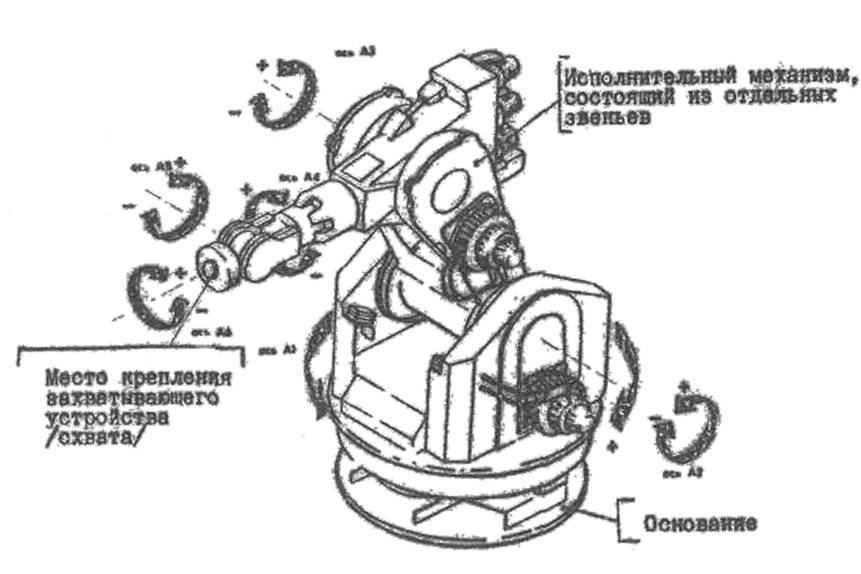 |
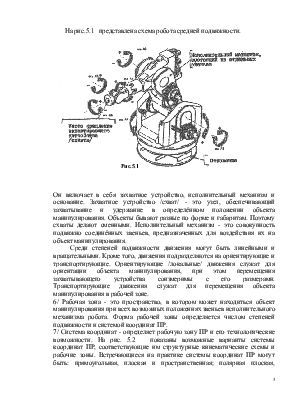
Он включает в себя захватное устройство, исполнительный механизм и основание. Захватное устройство /схват/ - это узел, обеспечивающий захватывание и удержание в определённом положении объекта манипулирования. Объекты бывают разные по форме и габаритам. Поэтому схваты делают сменными. Исполнительный механизм - это совокупность подвижно соединённых звеньев, предназначенных для воздействия их на объект манипулирования.
Среди степеней подвижности движения могут быть линейными и вращательными. Кроме того, движения подразделяются на ориентирующие и транспортирующие. Ориентирующие /локальные/ движения служат для ориентации объекта манипулирования, при этом перемещения захватывающего устройства соизмеримы с его размерами. Транспортирующие движения служат для перемещения объекта манипулирования в рабочей зоне.
6/ Рабочая зона - это пространство, в котором может находиться объект манипулирования при всех возможных положениях звеньев исполнительного механизма робота. Форма рабочей зоны определяется числом степеней подвижности и системой координат ПР.
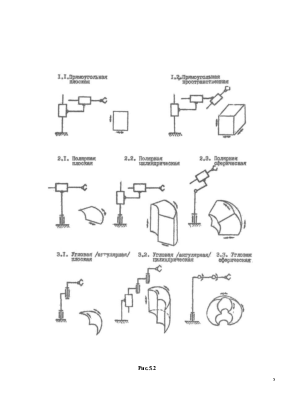
7/ Система координат - определяет рабочую зону ПР и его технологические возможности. На рис. 5.2 показаны возможные варианты системы координат ПР, соответствующие им структурные кинематические схемы и рабочие зоны. Встречающиеся на практике системы координат ПР могут быть: прямоугольная, плоская и пространственная; полярная плоская, цилиндрическая и сферическая; угловая /ангулярная/ плоская, цилиндрическая и сферическая; комбинированные /сочетание в различных комбинациях основных типов систем координат/.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.