Одной из наиболее важных
задач подсистемы внутреннего состояния является обеспечение высокой точности
позиционирования, за счёт
регистрации в каждый момент времени фактического положения исполнительных
звеньев робота и сравнения их с заданным положением. В качестве датчиков
обратной связи по положению в ПР используются в большинстве случаев аналогичные
датчики, какие применяются для систем управления металлорежущими станками.
Находят применение кодовые,
импульсные и аналоговые датчики. Учитывая относительно невысокие
требования по точности и ограниченность пространства для ПР,
чаще всего применяются круговые датчики положения.
|
В качестве датчиков скорости, как обычно, используются тахогенераторы.
Для измерения крутящих моментов, возникающих на внутренних элементах привода исполнительных звеньев робота, используются датчики, основанные на измерении угловых деформаций вращающегося вала или напряжений, возникающих при его деформации.
Датчики внутренней диагностики предназначены для определения причин отказов при их появлении, прогнозирования отказов с целью увеличения срока службы отдельных механизмов робота и сокращения времени восстановления их работоспособности. В качестве датчиков внутренней диагностики используются датчики, измеряющие давление в гидро и пневмосети, уровни питающих напряжений, режима работы отдельных элементов и т.п.
Датчики аварийной блокировки
предназначены для предохранения ПР и обслуживаемых их механизмов от поломок при
появлении случайных сбоев, предельных внешних силовых воздействий и других
помех
в процессе работы робота. Система аварийной блокировки срабатывает,
например, если отдельные элементы степеней подвижности доходят до
своих кинематических ограничителей; захватное устройство "натыкается"
на деталь или отдельные части обслуживаемого им оборудования;
ПР пытается переместить деталь, не совершив необходимых предварительных
движений по обходу препятствий. В качестве датчиков аварийной блокировки могут
использоваться путевые конечные переключатели,
датчики расхода, давления и температуры, датчики предельных значений различных
параметров, например, скорости, ускорения, усилия и т.п.
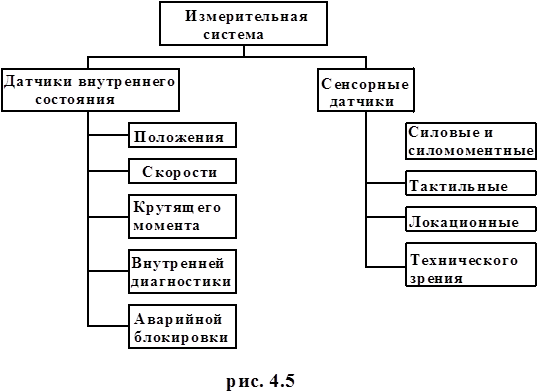
Сенсорные датчики - это чувствительные устройства, предназначенные для получения оперативной информации о состоянии внешней среды. К сенсорным датчикам относятся: валовые и силовые и силомоментные, тактильные, локационные и датчики технического зрения.
Силовые и силомоментные датчики позволяют измерять усиляя в точке контакта схвата с деталью, при этом действующие силы и моменты измеряются в плоскости или в пространственной системе координат. Такие датчики используются в роботах, осуществляющих манипулирование хрупкими и легкодеформируемыми предметами или выполняющих простые операции сборки. В качестве силовых и силомоментных датчиков используются полупроводниковые и фольговые тензорезисторы, пьезоэлектрические и магнитоупругие преобразователи.
Полупроводниковый тензорезистор представляет собой кремневую пластину с приваренными к ней проводниками. Тензодатчик образует мостовую измерительную схему, с которой снимается электрический сигнал, возникающий при деформации основания, на котором наклеен датчик. Фольговые датчики более стабильны по характеристикам, но имеют в несколько десятков раз меньшую чувствительность к деформациям.
Пьезоэлектрические преобразователи с кварцевыми чувствительными элементами используются для непосредственного измерения упругих деформаций на основе измерения величины заряда, пропорционального внутренним механическим напряжениям, вызываемым действием внешних сил.
Магнитоупругие преобразователи основаны на эффекте изменения магнитных свойств ферромагнитных материалов под влиянием механических напряжений при действии внешних сил.
Пример силомоментного датчика с простым разделением векторов силы и момента механическим способом представлен не рис. 5.6. Такой датчик ставиться в основании пальцев схвата манипулятора. На рис. 5.7. изображен ещё один датчик такого типа, состоящий из двух частей, которые могут использоваться либо совместно, либо независимо друг от друга. Тензорезисторы Т, объединенные в мостовые схемы располагаются на наборе плоских пружин, ориентированных в верхней части вдоль оси датчика, а в нижней - в плоскости датчика. Четыре отверстия А служат для крепления датчика к запястью манипулятора, отверстия В и С - для соединения верхней и нижней частей датчика, а отверстия Д служат для крепления датчика к охвату манипулятора.
Тактильные датчики позволяют получить информацию о моменте контакта схвата с объектом манипулирования, о местоположении точки контакта, о наличии или отсутствии детали в схвате и, в некоторых случаях, о размере объекта манипулирования. Эти датчики технически могут быть реализованы на концевых переключателях, герметизированных магнитоуправляемых контактах, пьезокристаллических преобразователях, на основе токопроводящей резины и т.п. Основными требованиями к тактильным датчикам является высокая чувствительность, малые габариты, высокая механическая прочность и надежность.
На основе одиночных тактильных чувствительных элементов могут быть построены матричные тактильные чувствительные элементы с высокой плотностью размещения /на площади 35x35 мм можно разместить до 256 чувствительных элементов/. На рис.5.8. представлена функциональная схема матричного тактильного датчика с простыми электрическими контактами. На рис.5.8. а /показаны составные части датчика: 1 - верхняя пластина; 2 – контактный штифт; 3 - пластина с отверстиями; 4 - печатная плата с парами контактных точек и проводами. На рис.5.8. б/ показан принцип действия контактного штифта: 1 - штифт из изоляционного материала; 2 - токопроводящая резина; 3 - контактная точка; 4 - диод; 5 - опарная точка пайки.
Матричные тактильные датчики на основе пьезоэлектрических преобразователей имеют большую надежность работы и выше чувствительность. Существенным недостатком тактильных датчиков является накладывание ограничения на быстродействие робота, так как они начинают работать только в момент контакта схвата а деталью.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.