Метод математического анализа предполагает преобразование полученного изображения объекта в цифровую форму и анализ его по определенным алгоритмам для распознавания и идентификации.
Метод “анализа сцен” наиболее сложный и объемный. Он предполагает получение изображения не только идентифицируемого объекта, но и всей окружающей его обстановки. Обработка информации начинается с выделения необходимого объекта из все полученной “сцены”, концентрации внимания только на нем и дальнейшей идентификации этого объекта одним из выше описанных методов.
Функции устройства выработки управляющих воздействий общеизвестны: управление исполнительными звеньями ПР для наведения схвата на деталь, захват детали и манипулирование по заданной программе.
Системы технического зрения могут быть монокулярными, бинокулярными /стереозрение/ и с большим числом точек зрения /например, при подвижной приемной камере и фиксации изображения с различных позиций/.
Наибольшее распространение в настоящий момент находят СТЗ черно-белого изображения с двумя уровнями /двумя градациями/, в которых выделяются только две крайние градации яркости изображения /0 или 1/ без учета промежуточных значений яркости, т.е. без полутонов серого цвета. Однако предполагается, что многостадийные СТЗ, такие как и цветные, найдут широкое применение в ближайшем будущем.
5.7. Роботы 3-го поколения /интеллектуальные роботы/
Роботы 3-го поколения характеризуются: более богатыми средствами очувствления, микропроцессорной обработкой данных, способностью распознавания обстановки, адаптацией к окружающей среде и изменяющимся условиям работы. Такие роботы оснащаются системами искусственного интеллекта, а ЭВМ, входящие в их состав, программируются эвристическими методами. В этом случае человек задает только цель, а последовательность действий для достижения этой цели /т.е. алгоритм работы/ вырабатывается самой системой управления роботом.
Под искусственным интеллектом понимается способность робота оценивать обстановку и правильно реагировать на новую ситуацию. Для этого система управления должна иметь способность обрабатывать информацию о внешней среде с построением ее модели и использованием этой информации для планирования поведения в условиях заведомой неполноты информации и непредсказуемо изменяющейся внешней обстановки.
Уровень как искусственного, так и естественного интеллекта оценивается специальными тестами. Например, поместив обезьяну в клетку, где вверху подвешены бананы, которые без специального приспособления обезьяне невозможно. В углу клетки находится палка. Если обезьяна догадывается использовать палку для того, чтобы достать бананы, она проявляет определенный интеллект. Необходимым условием этого эксперимента является то, что ранее этой обезьяне никто не подсказывал решения и в данную ситуацию она попала впервые.
Как указывалось выше, системы искусственного интеллекта основываются в большинстве случаев на эвристических методах программирования, т.е. когда при решении какой-либо задачи полный перебор различных вариантов невозможен из-за большого их количества и недостаточности объема памяти ЭВМ. При этом определенными методами выбираются для рассмотрения только некоторые варианты, которые с наибольшей вероятностью могут привести к положительному решению заданной задачи. К типичным задачам, решаемым искусственным интеллектом, относятся, например, игровые задачи /шахматы, нарды и т.п./, доказательство теорем, переводы с одного языка на другой и аналогичные задачи.
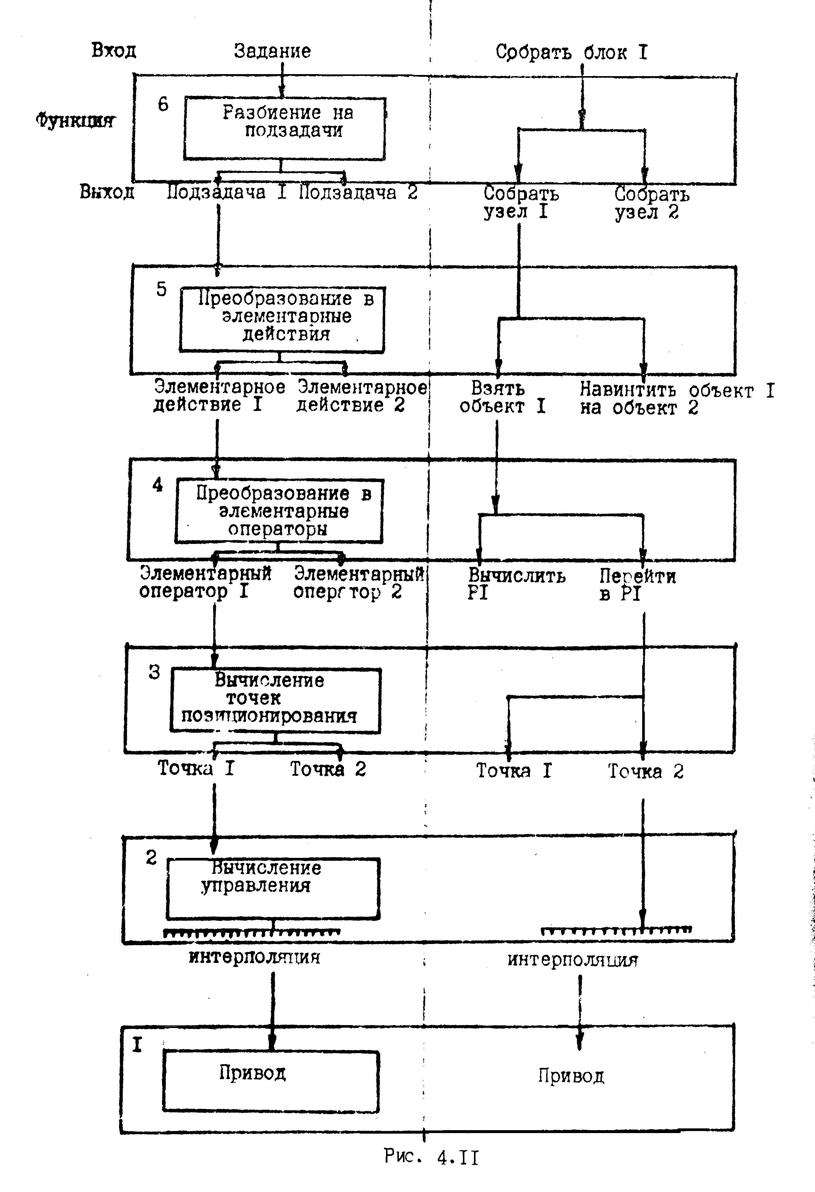
Сложные системы в большинстве случаев строятся по иерархическому принципу. Иерархия – это такой многоуровневый набор взаимодействующих подсистем, каждая из которых решает строго определенную задачу. Каждый уровень иерархии находиться в подчинении вышестоящего уровня. Структурная схема системы управления интеллектуальным роботом представлена на рис. 5.11. Она включает в себя шесть уровней. Для каждого уровня указывается входная информация, выполняемая функция и выходная операция. Причем в левой части все эти элементы представлены в общем виде, а в правой части – конкретный пример выполнения операции сборки.
Основной целью исследований в области интеллектуальных систем является:
1. Изучение и познание естественного интеллекта. Создание модели человеческого мозга и разгадка процесса его мышления.
2.
|
В создании искусственного интеллекта существуют два принципиально отличных подхода. Первый подход основан на универсальном решении и заключается в разработке общего теоретического решения проблемы на основе адекватного математического аппарата. Второй подход заключается в постепенном накоплении знаний и частных эвристических решений определенных задач. Сумма таких частных решений, по мере их накопления, повышает интеллектуальный уровень и открывает качественно новые возможности в создании самосовершенствующихся систем искусственного интеллекта. В области робототехники в настоящее время наиболее перспективным является второй подход создания интеллектуальных систем.
Работы по созданию искусственного интеллекта ведутся по следующим основным направлениям:
1. Разработка программных /МО/ и аппаратных средств для манипулирования знаниями с возможностью пополнения данных и их корректировки. Примером работ в этом направлении может служить разработка экспертных систем. Экспертная система – это вычислительная система, в которую включены знания специалистов с некоторой конкретной проблемной области и которая в пределах этой области способна принимать экспертные решения. Работа экспертных систем основана на базе знаний, которые значительно шире обычных баз данных и имеют большие творческие возможности.
2. Создание интерфейсов или средств общения машины с человеком на языке, максимально приближенном к человеку, например, человеческую речь.
3. Разработка методик работы интеллектуальных систем, планирующих свою деятельность по решению поставленной задачи /разработка алгоритмов решения задачи/.
4. Разработка методик изучения интеллектуальных систем.
В заключение следует отметить, что проблемы изучения искусственного интеллекта являются только частью кибернетических проблем. Если кибернетика занимается проблемами управления и связями в живом организме, то работы по искусственному интеллекту касаются только изучения мозга.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.