ОБЩИЕ ПОДХОДЫ ПРОЕКТИРОВАНИЯ ЛСУ
ЛСУ – этот система управления, которая предназначена для контроля и регулирования одного функционального параметра (расход, давление, скорость, температура и т.д.)
Если система предназначена для контроля двух или трех параметров, она называется многомерной и состоит функционально из двух или трех ЛСУ. Методы расчета таких ЛСУ идентичны.
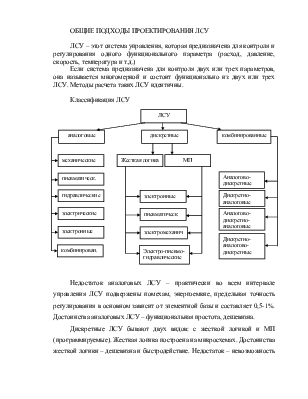
Классификация ЛСУ
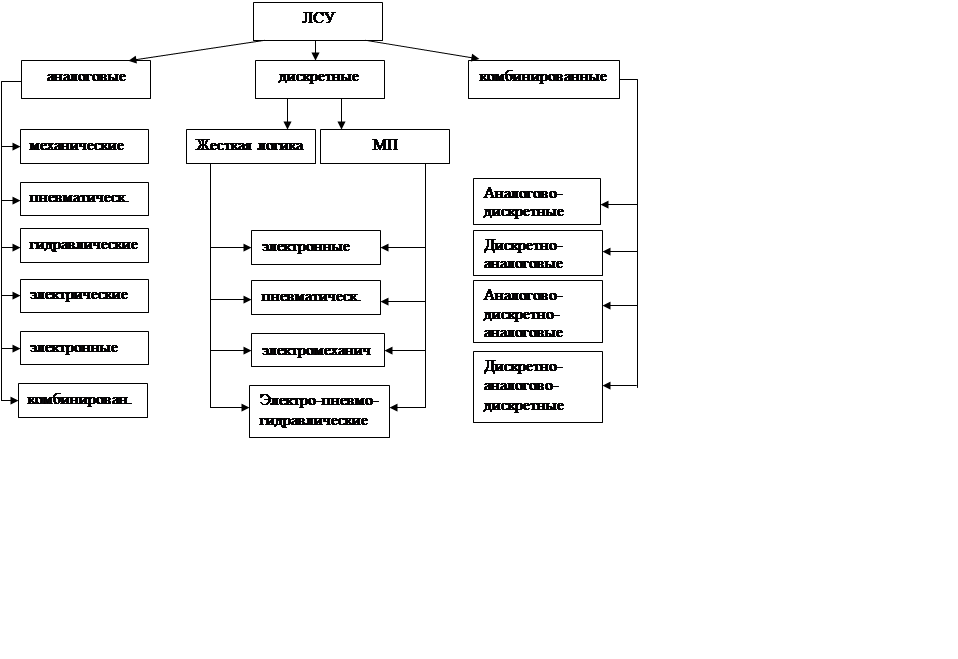
Недостаток аналоговых ЛСУ – практически во всем интервале управления ЛСУ подвержены помехам, энергоемкие, предельная точность регулирования в основном зависит от элементной базы и составляет 0,5-1%. Достоинства аналоговых ЛСУ – функциональная простота, дешевизна.
Дискретные ЛСУ бывают двух видов: с жесткой логикой и МП (программируемые). Жесткая логика построена на микросхемах. Достоинства жесткой логики – дешевизна и быстродействие. Недостаток – невозможность построения программы управления. Достоинства МП – возможность построения программ управления. Недостаток МП – инерционность.
Комбинированные ЛСУ. Как правило все датчики и исполнительные устройства ЛСУ являются аналоговыми, поэтому все ЛСУ разделились на две части: аналоговую и дискретную. Схема ЛСУ:
 |
Недостаток комбинированных ЛСУ – порты сопряжения.
Общие требования к ЛСУ:
1. энергоемкость – полное потребление энергии ЛСУ за определенный промежуток времени. Критерий энергоемкости: ЭОУ=0,5ЭЛСУ;
2. вид потребляемой энергии – желательно к этому понятию подключать географический смысл, т.е. учитывать наличие местной энергии для ЛСУ;
3. надежность работы – определяется минимальной надежностью одного из элементов системы;
4. быстродействие – скорость прохождения сигнала от элемента к элементу;
5. точность поддержания выходного параметра – допускается 5%;
6. вид ЛСУ – аналоговые, дискретные, комбинированные;
7. элементная база – желательно использование новых устройств;
8. влияние внешних возмущений – электромагнитные поля, электростатические поля, температура, звук, свет, радиация и т.д.;
9. специфика внешних условий, биозащита – защита от погодных условий, насекомых, грызунов и т.д.;
10. масса ЛСУ;
11. габариты ЛСУ;
12. дизайн – привлекательность для потребителя.
Рассмотрим два случая: одностороннее управление и двустороннее управление.
 Одностороннее управление «на меньше». Рассмотрим воздушный
шар.
Одностороннее управление «на меньше». Рассмотрим воздушный
шар.
mc
g
У шара в данном случае нет балласта, регулирование ведется путем стравливания газа из оболочки шара. Энергия, которой обладает шар:
W=mc*g*hm,
где mс – суммарная масса шара и груза;
hm – максимальная высота, на которую поднимается шар;
g – ускорение свободного падения.
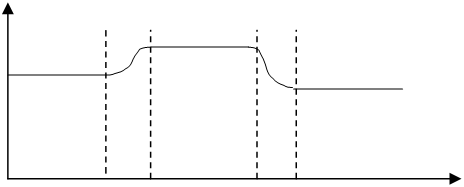
Рассмотрим график полета шара:
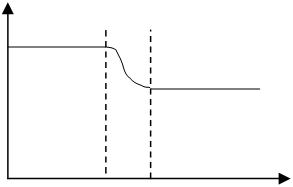 h
h
t1 t2 t
В момент времени t1 газ из шара выпустили, произошло снижение. Время снижения шара:
Dt=t2-t1.
Мощность, полученная в результате снижения:
 .
.
 -
быстродействие, скорость снижения.
-
быстродействие, скорость снижения.
Вывод: скорость снижения будет выше в двух случаях:
- чем больше мощность стравливания газа из шара или чем больше мощность привода;
- чем меньше масса груза.
При одностороннем регулировании скорость регулирования выше в двух случаях:
- если мощность привода больше;
- если объект регулирования имеет малую инерционность.
Таким образом, постоянная времени Т любого элемента ЛСУ зависит от двух факторов:
- его конструкции и физических свойств;
- от мощности источника питания.
Таким образом, для конкретной задачи синтеза ЛСУ для каждого звена необходимо анализировать источник питания.
Двустороннее регулирование «в обе стороны». Движение шара вниз происходит за счет стравливания воздуха, а движение вверх – за счет сбрасывания балласта.
 h
h
t1 t2 t3 t4 t
Мощность снижения остается прежней. Движение вверх тем быстрее, чем быстрее сбрасывается груз.
Вывод: максимальная высота подъема шара может быть достигнута, когда весь балласт сброшен, но при этом двустороннее управление станет невозможным. Таким образом, двустороннее управление предполагает наличие резерва мощности, когда регулирование осуществляется не на максимальной координате, а на координате h<hm.
Таким образом, ЛСУ, осуществляя двустороннее регулирование, обладает скрытым резервом мощности энергетики. Чем больше запас, тем выше быстродействие.
ЭТАПЫ СИНТЕЗА ЛСУ
1 Техническое задание
В ТЗ формулируется название системы по функциональному признаку.
Рассмотрим пример: ЛСУ расхода сыпучих материалов для упаковки в различную габаритную тару.
Требования, предъявляемые к ЛСУ:
- энергоемкость, при сложных технических операциях ЛСУ по принципу энергоемкости не оценивается(медицина, ядерная энергетика); в нашем примере – 200 Вт;
- вид потребляемой энергии – для нашего примера: электрическая энергия;
- надежность работы – необходимо соотнести рыночную потребность ЛСУ с ее долговечностью; в нашем примере Тбо=2 года;
- быстродействие – определяется рыночной потребностью в товаре; в нашем примере допустимо 5 мин.;
- точность поддержания выходного параметра – допустимо 5%, каждый 1% уточнения приводит к повышению стоимости на 20%;
- вид ЛСУ – дозатор сыпучих материалов – комбинированная ЛСУ;
- элементная база – желательно выбирать элементы после 1990 г.
- влияние внешних возмущений – в нашем примере нужна зашита от электростатических полей, звуковых воздействий, световых воздействий, пределы изменения температуры от –100С до +400С;
- специфика внешних условий, биозащита – защита от насекомых, грызунов, погодных условий;
- масса;
- габариты;
- дизайн – привлекательность для потребителя.
2 Элементный синтез (размерностный)
Исходя из принятого ТЗ выбираются элементы (звенья) ЛСУ по их размерностям. Выбор ведется справа налево.
Синтез начинается с объекта управления.
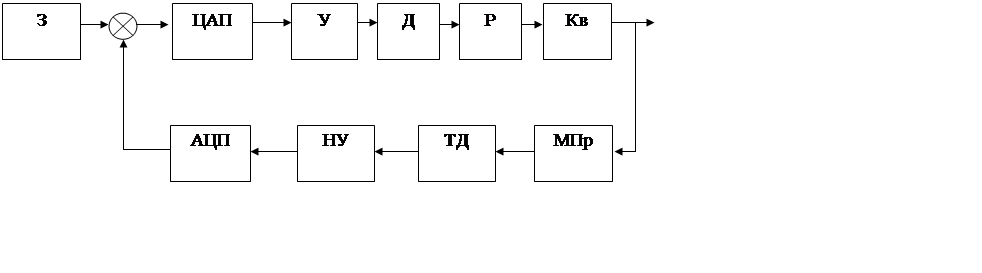 |
Кв – конвейер винтовой, Q[кг/с];
Р – редуктор, w [рад/с];
Д – двигатель, w1 [рад/с];
У – усилитель, U1 [В];
З – задающее устройство, U2 [В];
МПр – механический преобразователь, Р [Па];
ТД – тензодатчик, Rх [Ом];
НУ – нормирующий усилитель, U4 [В].
В качестве З можно использовать таймер, реле, микропроцессор. Для постоянства массы в упаковке надо регулировать время упаковки, в этом случае обратную связь делают по параметру, связанному со временем.
m[кг]=[кг/м2]*[м/с]*[с]*[м] – это вариант четырехконтурного регулирования по четырем параметрам: давление на поверхности конвейера (дозатор), скорость перемещения ленты, время насыпания, линейное перемещение ленты конвейера. Регулирование может вестись по одному параметру, все остальные при этом постоянны. Если учесть, что нестабильность присутствует в любой ЛСУ, регулирование можно вести по всем четырем параметрам. Выберем контур с измерением давления на поверхность конвейерной ленты, поскольку в качестве привода выбран электродвигатель, регулировать будем скорость перемещения, а измерять – давление.
3 Метрологический синтез
На этом этапе задается по ТЗ метрологическая точность объекта управления. Метрологическая точность ОУ на входе определяется с помощью статической характеристики, в относительных единицах. Далее рассчитываются погрешности всех звеньев ЛСУ, допустимые диапазоны абсолютных значений параметров, которые соответствуют выбранной в ТЗ погрешности.
4 Энергетический синтез
Соседние по функциональной схеме звенья должны отвечать оптимальным критериям согласования нагрузок: выходная мощность предыдущего звена должна быть не меньше входной мощности последующего звена.
Рассмотрим ЛСУ сыпучих материалов:
- Кв: 25 кг за 5 с, тогда  Вт;
Вт;
- Мпр: его КПД<1, тогда примем N=42 Вт;
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.