Эти уравнения записаны без взаимной связи.
Поскольку все рули воздействуют на самолет как на объект управления, рассматривать объект можно только во взаимосвязи положений всех рулей.
 ,
,
…
 .
.
eij – коэффициент влияния управляющих каналов на объект управления.
Из этих уравнений могут быть получены передаточная функция, коэффициенты передачи и постоянные времени многосвязного объекта.
4. Газовый ресивер
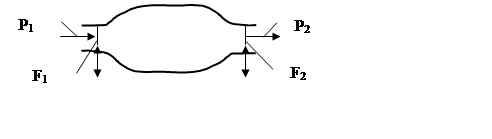
Газовый ресивер предназначен для создания высокого давления воздуха или газа (до 10 Мпа) с целью питания двигателей внутреннего сгорания, сварочных устройств и строительных механизмов, основной вид энергии для космических и подводных аппаратов.
Газовый ресивер представляет собой толстостенный сосуд, рабочая среда с плотностью r в котором поддерживается под небольшим давлением Р1, подача регулируется заслонкой F1. Отбор энергии сжатого воздуха производится с давлением Р2, которое может быть больше или меньше Р1, отбор регулируется заслонкой F2.
 ,
,
 .
.
Получим дифференциальное уравнение:
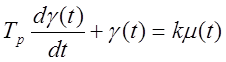
 .
.
Для газового баллона:
F2=10 мм, DF1=1 мм.
 ,
,
Р1=4 МПа, Р2=0,04 МПа, r=1,3.
 ,
тогда k=0,03.
,
тогда k=0,03.
Время переходного
процесса ![]() с, тогда Т=0,1/3=0,033 с.
с, тогда Т=0,1/3=0,033 с.
 .
.
Подобный ресивер может быть использован в ЛСУ в качестве автономного источника питания пневматических элементов.
5. Электродвигатель
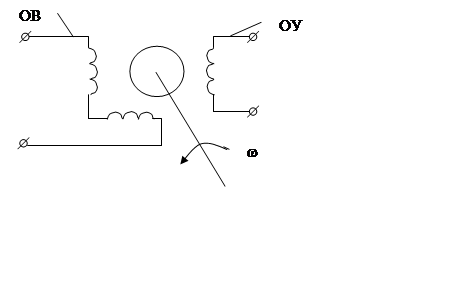
Двигатель содержит три обмотки: обмотку управления ОУ, на которую подается напряжение управления Uу, и две полуобмотки возбуждения ОВ, смещенные на 900 по статору, на которые подается напряжение возбуждения Uв. Вал двигателя вращается с частотой w.
Рассмотрим двигатель: N=200 Вт, Uв=110 В, Uу=0 – 100 В, w0=2500.
 .
.
Для любого двигателя:
 .
.
Т=2/3=0,66 с.
Для любого двигателя:
 .
.
F – сила трения в подшипниках.
6. Ядерный энергетический реактор
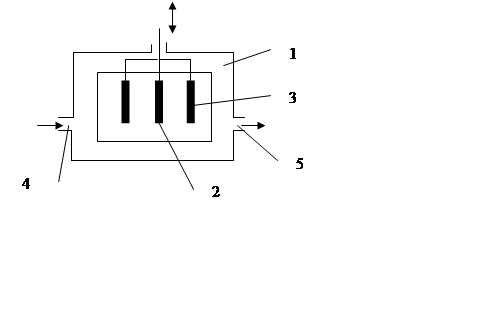
Котел 1 содержит урановые элементы 2, помещенные между графитовыми стержнями 3, которые могут перемещаться вверх – вниз. Котел 1 омывается водой первого контура, которая входит в трубу 4 и выходит из трубы 5. Температура воды зависит от взаимного положения графитовых стержней 3 и урановых элементов 2.
где L – относительное перемещение графитовых стержней,
Т – относительная температура воды первого контура.
Для Балаковской АЭС:
k=150/2=75 град/м.
Т=5976 с.
Для любого реактора:
 .
.
 ,
,
Рв – давление воды в первом контуре.
Введение.
Расширенное техническое задание – требования к ЛСУ, функциональная схема, конкретные требования ко всем объектам ЛСУ: задаются метрологические характеристики, энергетические характеристики привода, требования к датчикам. Большинство показателей технического задания становятся расширенными в процессе выполнения курсового проекта.
Выбор и обоснование элементов ЛСУ – выбор микропроцессора обусловлен сложностью функциональных задач, которые решает ЛСУ, числом каналов цифровой информации: 1-ый канал – задатчик (программатор), 2-ой и последующие каналы – каналы охвата звеньев ЛСУ цифровой обработкой. Необходимо стремиться к минимальной разрядности микропроцессора. Коэффициент передачи усилителя обусловлен тем, что на входе усилителя – напряжение с ЦАП, а его выходное напряжение должно соответствовать напряжению, необходимому для работы других устройств. Как правило усилитель является безынерционным звеном. Коэффициенты передачи и постоянные времени находятся из справочников, но могут быть и рассчитаны.
Передаточная функция находится в окрестности рабочей точки (индекс «0»). Предполагается, что ЛСУ работает в так называемом автопилотном режиме, когда отклонения незначительны. Можно оценивать передаточную функцию по мощностям – подсчитывать мощность каждого элемента ЛСУ по справочным данным. Во всех передаточных функциях коэффициенты передачи ЛСУ должны быть безразмерными.
Расчет датчика обратной связи – носит схематический характер.
Расчет системы на устойчивость – с помощью программы MathCAD строятся графики переходного процесса, АЧХ и ЛАЧХ. Если ЛСУ устойчива в разомкнутом состоянии, осуществляется переход к «цифре».рекомендуется уменьшать коэффициент передачи системы, задемпфировать систему по знаменателю передаточной функции.
Микропроцессорное управление и коррекция – микропроцессор необходим для гибкого управления, цифровой коррекции. Период дискретизации Т0 задается, считается, что чем меньше Т0, тем лучше, но из-за неоправданного уменьшения Т0 резко возрастает сложность системы. Рекомендуется выбирать Т0=1/20Тmin. Система проверяется на устойчивость по критерию Шур-Кона.
Построение ЛАЧХ – для
дискретных ЛСУ в передаточной функции вводятся замены:  ,
,
 . ЛАЧХ строится методом типовых
наклонов.
. ЛАЧХ строится методом типовых
наклонов.
Цифровая коррекция – для коррекции ЛСУ необходимо построить желаемую ЛАЧХ. Она может быть построена методом запретных зон или обычным методом. Находится ЛАЧХ корректирующего устройства: LКУ=LЖ - - LФ. При управлении микропроцессором ЛСУ не меняет принципиально своего режима работы, и переходного процесса, вызванного микропроцессором и цифровой обработкой сигнала, не происходит.
Программа коррекции –
проводится обратное преобразование:  ,
,  , полученное уравнение соответствует
корректирующему устройству, для него пишется программа.
, полученное уравнение соответствует
корректирующему устройству, для него пишется программа.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.