Введение корректирующего воздействия по наиболее сильному возмущению позволяет существенно снизить динамическую ошибку регулирования при условии правильного выбора и расчёта динамического корректора. Основой расчёта систем комбинированного действия является принцип инвариантности: отклонение выходной координаты от заданного значения должно быть тождественно равным нулю при любых задающих и возмущающих воздействиях. Условие инвариантности комбинированной САР записывается в виде
y(t) = 0
Рассмотрим схему рис.4.1.
Рис.4.1а. Преобразованная эквивалентная структурная схема комбинированной САР с введением корректирующего сигнала на выход регулятора.
Запишем условие инвариантности (1) в изображении Лапласа с учётом передаточных функций объекта по каналам возмущения WB(s) и управления WU(s) динамического корректора WK(s) и регулятора R(s).
 |
Рис.4.1б. Схема собранная в КОПРАСЕ.
Структурная схема состоит из последнего соединения разомкнутой системы WPC(s) и замкнутого контура WЗК(s), передаточные функции которых соответственно равны:
WPC(s) = WB(s) + WK(s) WU(s)
WЗК(s) = 1 / (1 + WR(s) WU(s) )
При этом условие инвариантности примет вид:
Y(s) = F(s) WPC(s) WЗК(s) = 0
и, если F(s) ¹ 0 и WЗК(s) ¹ 0, то должно выполняться условие:
WPC(s) = WB(s) + WK(s) WU(s) = 0
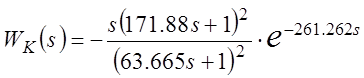
WK(s) = - WB(s) / WU(s)
т.е. условие компенсации возмущения в этом случае определяется только свойствами самого объекта и не зависит от параметров настройки автоматического регулятора основного контура.
Компенсаторы физически нереализуемы в двух случаях:
1. Время чистого запаздывания по каналу управления больше, чем по каналу возмущения.
2. В передаточной функции идеального компенсатора степень полинома числителя больше степени полинома знаменателя.
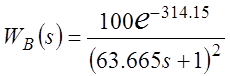
Поскольку для передаточных функции по управлению и возмущению выполняется 2-е условие необходимо внести изменения. Найдём передаточную функцию объекта по каналу возмущения другим методом идентификации, таким образом, чтобы, записанное условие 2 нквыполнялось. Получим, что передаточная функция по каналу возмущения имеет вид:
Условие 1 при этом также не выполняется, т.е.
Расчёт параметров регулятора:
4.2. Показатели качества комбинированной САР.
 |
1. Время регулирования tр = 2263 с
2. Время достижения первого максимума tмакс = 496 с.
3. Логарифмический декремент затухания:
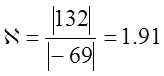
Число колебаний n = 4
 |
1. Время регулирования tр = 1202 с
2. Время достижения первого максимума tмакс = 455 с.
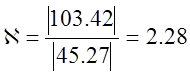
3. Логарифмический декремент затухания:
5. Каскадные системы автоматического регулирования.
5.1. Общие сведения о каскадных САР.
5.2. Расчет каскадных систем автоматического регулирования.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.