Передаточная функция для расчёта стабилизирующего регулятора:
 |
Рис.2.4. Графики переходных процессов объекта для расчёта стабилизирующего регулятора (метод Наслена 2).
Занесем в таблицу 1 значения T,t ,а также порядок аппериодического звена и номер рисунка.
Таблица 1.
Данные передаточных функций.
|
№ рисунка |
16 |
1 |
4 |
7 |
|
порядок, n |
2 |
1 |
1 |
2 |
|
K |
100 |
100 |
100 |
100 |
|
T1 |
171.88 |
57.334 |
81.182 |
0.3708 |
|
t |
52.858 |
350.64 |
589.8 |
0.1792 |

3.1. Расчёт одноконтурной системы регулирования.
(Метод Циглера - Никольса)
Рассмотрим одноконтурную систему регулирования с реальным ПИД-регулятором и объектом второго порядка по каналу управления, имеющего передаточную функцию вида:
![]()
Рис.3.1. Схема САР с реальным ПИД-регулятором.
Установив максимальное значение коэффициента усиления регулятора К и Тi и минимального значения для Тd уменьшая К вводим систему на границу устойчивости. При этом значения Ккр и периода колебании Ткр равны:
Ткр = 708-270 = 438
Ккр = 0,0706
Рис.3.2. Автоколебания САР с реальным регулятором.
Настройка регулятора производится по следующим формулам:
 |
П. – регулятор:
К = 0.5Ккр = 0.5*0.0706 = 0.0353
ПИ – регулятор:
Тi =0,83*Ткр = 363,54
ПИД - регулятор:
Тi =0,5*Ткр = 219
Тd =0,125*Ткр = 54,75
Графики переходных процессов для различных регуляторов приведены на рис.3.3.
Рис.3.3. Переходные процессы в системе.
1 – ПИД – регулятор; 2 – ПИ – регулятор; 3 – П – регулятор.
3.2. Расчёт показателей качества
 |
Рис.3.4. Переходная характеристика одноконтурной системы регулирования с ПИД – регулятором.
1. Время регулирования tр = 803 с
2. Время достижения первого максимума tмакс = 326 с.
3. Время нарастания tн = 204 с
4. Логарифмический декремент затухания:
 |
1. Время регулирования tр = 1767 с
2. Время достижения первого максимума tмакс = 367 с.
3. Время нарастания tн = 235 с
4. Логарифмический декремент затухания:
Лучшими показателями качества обладает одноконтурная система с ПИД – регулятором по сравнению с системой с ПИ – регулятором.3.3. Синтез оптимальных регуляторов
Для расчёта оптимальных регулятора необходимо использовать блок “Optim”, указав системе три варьируемых параметра. При этом оптимизацию можно провести с учётом различных критериев.
Использование двух критериев, а, именно, интеграл квадрата ошибки, интеграл квадрата ошибки с учётом значения производной не приводит к существенному изменению значений параметров ПИД – регулятора. Поэтому для улучшения показателей качества системы используют другие критерии.
1. Критерий Т1макс: время наступления первого максимума.
 |
Рис.3.6. 1-Переходная характеристика одноконтурной САР.
2 – Оптимизированная переходная характеристика по критерию Т1макс при использовании метода Nelder – Mid.
2. Критерий Integral [x^2]:
Использование этого критерия приводит к значительному улучшению одновременно нескольких показателей качества: уменьшению времени достижения первого максимума, значению перерегулирования, времени регулирования.
По окончанию процесса оптимизации получим следующие значения параметров регулятора:
К = 0.0618
К / ТI = 0.0001056
К Тd = 4.0935
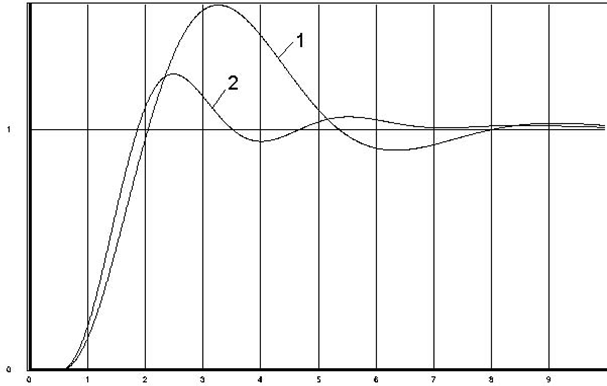 |
Рис.3.7. 1-Переходная характеристика одноконтурной САР.
2 – Оптимизированная переходная характеристика по критерию Integral [x^2] при использовании метода Nelder – Mid.
3.4. Исследование устойчивости системы путём построения областей устойчивости.
Исследование устойчивости проводим с помощью КОПРАСа, указав предварительно параметры по которым будут строиться области устойчивости. В нашем случае варьируемые параметры: коэффициент усиления К, время изодрома ТI.
Методом D – разбиения выделяем области в пространстве рассматриваемых коэффициентов, имеющих одинаковое число правых корней. Область имеющая минимальное число правых корней, то есть нулевое число правых корней и будет областью устойчивости системы.
Границы области поисков:
К от 0.017 до 0.0575
К / ТI от 0 до 0.0003
При завершении процесса исследования в блоках устанавливаются параметры:
К = 0.0568
К / ТI = 0.0003
3.5. Расчёт статической ошибки
Ошибку вычисляем по формуле:
Для ПИД - регулятора:
Для ПИ-регулятора :
.
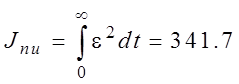
Интегральная квадратичная ошибка равна:
 4. Комбинированная система автоматического
регулирования.
4. Комбинированная система автоматического
регулирования.
 |
Если возмущающие воздействия значительны и резко изменяются, то необходимо воспользоваться комбинированными системами, компенсирующими не только регулируемую величину, но и действующее на неё возмущение.
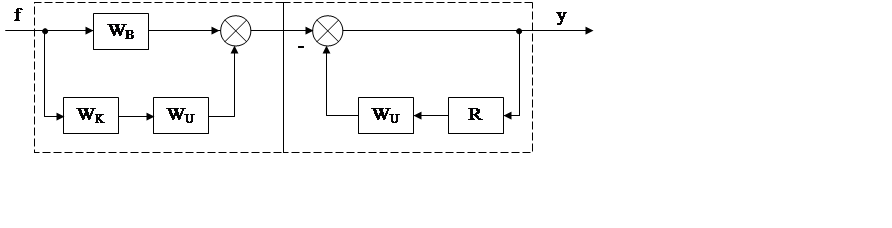
4.1. Компенсация возмущений по упреждающей цепи.
Упреждающее воздействие имеет цель немедленно скомпенсировать эффект от действия возмущения прежде чем оно появится в сигнале у на выходе объекта. Другими словами, регулятор сразу же реагирует на причину и не ждёт некоторое время, пока объект ответит на это возмущение соответствующей реакцией на своём выходе. При этом измеренный сигнал возмущения можно подать на вход либо на выход регулятора.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.