В переходном режиме расход воды не может характеризовать тепловой нагрузки топки, так как котёл обладает большой инерционностью и существенным запаздыванием по сигналу, характеризующим тепловую нагрузку топки. В переходном режиме тепловая нагрузка топки может быть определена по сумме сигналов расхода воды и скорости изменения давления воды в трубе. В этом случае скорость изменения давления в переходном режиме определяет разницу между количеством тепла, отбираемым из топки, и количеством тепла, вводимым в топку.
Исходя из изложенного выше, задача регулятора тепловой на грузки топки состоит в отработке сигнала регулирующего воздействия, который подается к регуляторам расхода топлива и воздуха в качестве сигнала задания. Значение сигнала задания во время регулирования процесса горения будет изменяться до тех пор, пока количество тепла, вводимое в топку, не станет равным количеству тепла, отбираемому из топки.
Измерение расхода воды производится манометром, работающим в комплекте с диафрагмой Д2.
Измерение скорости изменения давления производится дифференциатором давления ДФО.
Сигналы расхода и скорости изменения давления воды суммируются в общий сигнал, который поступает к регулятору тепловой нагрузки топки РТНТ в качестве сигнала текущего значения регулируемой величины (тепловой нагрузки топки).
Так как расходуемая вода при выходе должна соответствовать определённой температуре, то сигнал с регуляторы соотношения температур РСТ действует на РТНТ внося свой вклад в обеспечение тепловой нагрузки топки. На входе регулятора соотношения температур РСТ суммируются три сигнала, характеризующие температуру горячей воды, температуру наружного воздуха и заданное значение температуры воды, устанавливаемого с помощью простейшего потенциометрического задатчика.
При регулировании процесса горения изменение расхода воздуха может вызвать изменение разрежения в топке котла, так как при этом нарушится равенство между количеством газов, образующихся в топке, и количеством дымовых газов, отсасываемых из топки дымососами.
Разрежение в топке регулируется регулятором разрежения РР.
Для уменьшения величины отклонения разрежения в топке регулятором расхода воздуха. На рассматриваемой принципиальной схеме, динамическая связь показана пунктирной линией.
Посредством этой связи регулятор воздуха подает сигнал регулятору разрежения на изменение положения лопаток направляющих аппаратов дымососов (посредством исполнительных механизмов ИМ4 и ИМ5) до того, как произойдет значительное изменение разрежения в топке. По истечении определенного времени (времени настройки устройства динамической связи) поданный к регулятору разрежения сигнал динамической связи исчезнет, что обеспечит дальнейшую работу регулятора разрежения по обычной одноконтурной схеме. В этом смысле регулятор расхода воздуха и регулятор разрежения в топке работают по схеме автономного регулирования.
1.2. Функциональная схема и её описание.
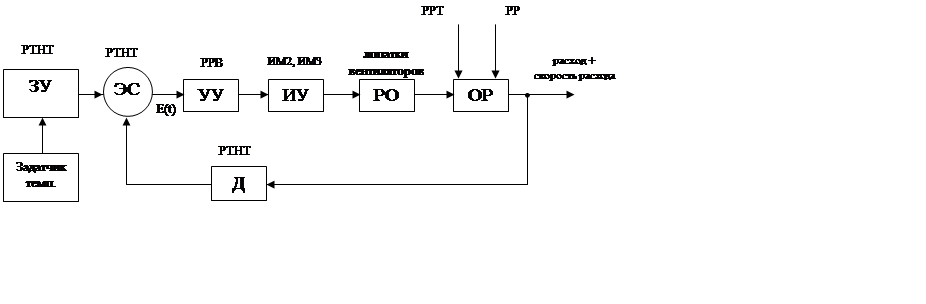 |
Рис.1.2. Функциональная схема водогрейной котельной установки.
В качестве задающего устройства ЗУ выступает РТНТ который вырабатывает значение управляемой величины (количество тепла). На ЗУ действует регулятор соотношения температур РСТ на который в свою очередь действует задатчик температур Д5, определяющий заданную температуру расходуемой горячей воды.
Элементом сравнения ЭС служит РТНТ который сравнивает количество тепла, вводимое в топку, и количество тепла, отбираемое из топки. Значение сигнала задания во время регулирования процесса горения будет изменяться до тех пор пока количество тепла, вводимое в топку, не станет равным количеству тепла, отбираемому из топки, т.е. пока Е(t) ¹ 0.
Управляющее устройство УУ (регулятор расхода воздуха РРВ) формирует управляющий сигнал U(t), достаточный для приведения в действие исполнительное устройство. В качеству ИУ используется исполнительный механизмы ИМ2 и ИМ3 которые в зависимости от подаваемого сигнала устанавливают лопатки направляющих аппаратов дутьевых вентиляторов в необходимое положение, т.е. в качестве регулирующего органа РО служит лопатки дутьевых вентиляторов.
Сигнал воздействует на объект регулирования ОР т.е. на котёл в который для подогрева подаётся вода. На выходе системы исследуется расход и скорость расхода горячей воды. Выходной сигнал по обратной связи поступает в датчик в качестве которого используется РТНТ в котором происходит преобразование выходного сигнала в количество тепла, необходимое для сравнения в ЭС. Далее всё вновь происходит по такому же принципу который был описан выше.
На объект действуют два возмущения в качестве которых выступают РРТ – регулятор расхода топлива и РР – регулятор разряжения.
2. Математическое описание объекта, основанных на различных методах идентификации.

Математическое описание объекта состоит в определении численных значении и
параметров передаточных функций по заданным динамическим характеристикам
объектов управления, используя различные методы идентификации. Причём, заданная
экспериментальная характеристика должна отличаться от идентифицируемой кривой
на величину, не превышающую 3%. При расчёте параметров функций применялся пакет
программ "ИСИДОРА".
Рис.2.1. Графики переходных процессов объекта по каналу управления (метод Наслена 2).
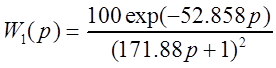
Передаточная функция объекта по каналу управления:
 |
Рис.2.2. Графики переходных процессов объекта по каналу возмущения (метод Трошина 1).
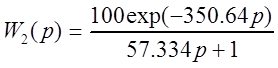
Передаточная функция объекта по каналу возмущения:
Передаточная функция объекта по каналу передачи воздействия из промежуточной точки:
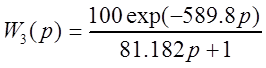

Рис.2.3. Графики переходных процессов объекта для расчёта по каналу передачи воздействия из промежуточной точки (метод Трошина 4).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.