![]() , (12.10)
, (12.10)
и сделаем подстановку его в уравнение (12.9):
![]() (12.11)
(12.11)
6. Проинтегрируем выражение (12.11) и сгруппируем в правой части члены полученного уравнения, не содержащие производных:
![]() . (12.12)
. (12.12)
7. Введем обозначение:
![]() (12.13)
(12.13)
и сделаем подстановку его в уравнение (12.12):
![]() (12.14)
(12.14)
8. Проинтегрируем
уравнение (12.14) и из полученного соотношения выразим ![]() :
:
![]() . (12.15)
. (12.15)
9. Объединив (12.15), (12.13) и (12.10), получим систему уравнений состояния:
 (12.16)
(12.16)
или в векторно-матричной форме:
![]() (12.17)
(12.17)
где
 .
.
12.3. Информация к выполнению задания 2
Пример выполнения задания 2
 Исследуемый объект − линейная
электрическая цепь 3-го порядка (рис. 12.1). Сформировать математическую модель
данного объекта в пространстве состояний.
Исследуемый объект − линейная
электрическая цепь 3-го порядка (рис. 12.1). Сформировать математическую модель
данного объекта в пространстве состояний.
1. В качестве переменных состояния принимаем:
![]()
![]()
![]() (12.18)
(12.18)
Следовательно, вектор состояния:
 (12.19)
(12.19)
2. На основании законов Кирхгофа формируем систему уравнений, количество которых должно быть равно порядку моделируемого объекта:
![]()
 (12.20)
(12.20)
3. Исключаем все неизвестные, не являющиеся переменными состояния.
Для этого ток i2 выразим через ![]() :
:
 (12.21)
(12.21)
и делаем подстановку его в систему (12.20):
![]()
 (12.22)
(12.22)
4. Приводим систему (12.22) к нормальной форме и записываем уравнения в порядке, соответствующем расположению переменных состояния в векторе состояния (12.19):
![]()
 (12.23)
(12.23)
или в векторно-матричной форме:
![]() (12.24)
(12.24)
где

 ; u(t) = e
; u(t) = e
при заданных начальных условиях:
![]() .
(12.25)
.
(12.25)
12.4. Информация к выполнению задания 3
Пример выполнения задания 2
Решение математической модели (12.24).
1. Задание параметров электрической цепи:
 2. Решение задачи Коши с помощью встроенной функции rkfixed:
2. Решение задачи Коши с помощью встроенной функции rkfixed:
Начальный вектор состояния:

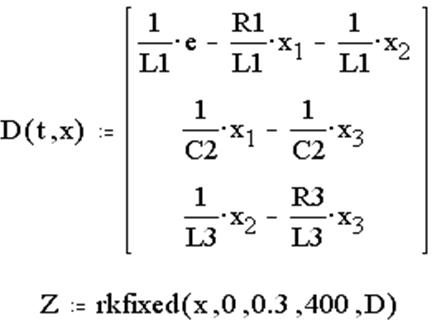
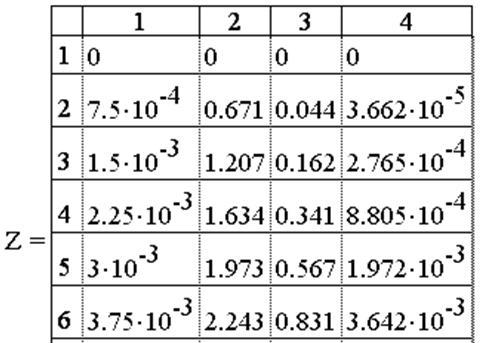
3. Вывод матрицы решения Z:
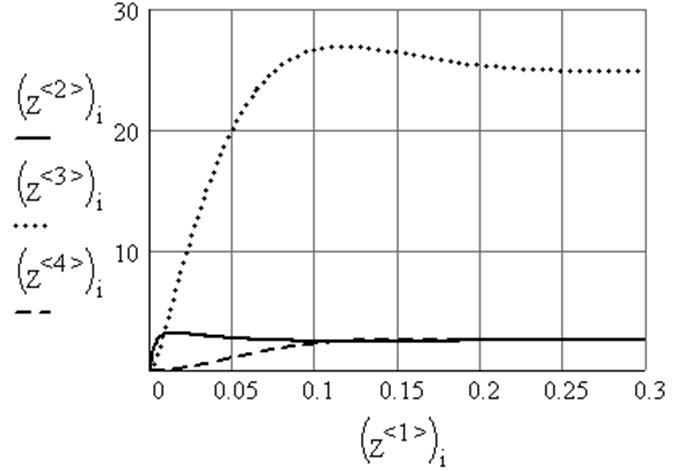
4. Графическое отображение решения модели (12.24):

![]()
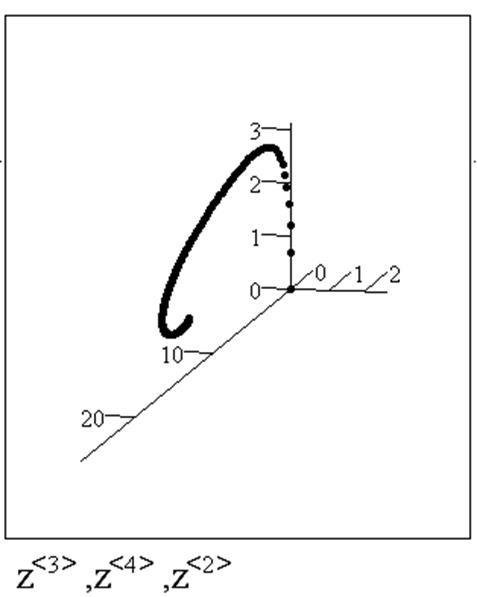
5. Построение фазовой траектории исследуемого объекта (рис. 12.1) :
12.5. Задания
1. Для линейной непрерывной стационарной системы задана математическая модель в форме передаточной функции W(p) (табл. 12.1). Сформировать два варианта математической модели данной физической системы в пространстве состояний:
а) на основе полюсов передаточной функции;
б) на основе дифференциального уравнения, соответствующего заданной передаточной функции.
2. Для заданного объекта − электрической цепи (табл. 12.2) сформировать математическую модель в пространстве состояний.
3. Решить сформированную модель с помощью встроенной функции rkfixed. Решение представить графически для отображения динамики изменения каждой переменной состояния xi исследуемого объекта.
4. Построить фазовую траекторию для отображения изменения состояния исследуемого объекта во времени.
5. Ответить на контрольные вопросы:
а) для физических систем какого класса передаточные функции в форме изображений Лапласа и в операторной форме совпадают?
б) почему задача определения нулей и полюсов передаточной функции имеет особо важное значение при исследовании объектов и систем ?
в) при каких условиях передаточные функции W(s) и W(p) могут достоверно описывать исследуемую физическую систему?
г) как определить порядок будущей модели в пространстве состояний, если известна передаточная функция исследуемого объекта?
Таблица 12.1
Математические модели в форме передаточных функций
|
Вариант |
Передаточная функция W(p) |
Вариант |
Передаточная функция W(p) |
|
1 |
2 |
4 |
3 |
|
1 |
|
8 |
|
|
2 |
|
9 |
|
|
3 |
|
10 |
|
|
4 |
|
11 |
|
|
5 |
|
12 |
|
|
6 |
|
13 |
|
|
7 |
|
14 |
|
Таблица 12.2
Исходные данные к заданию 2
|
Вариант |
Исходные данные |
Объект-оригинал |
||||
|
1 |
2 |
3 |
||||
|
1 |
|
|
||||
|
2 |
|
|
||||
|
3 |
|
|
||||
|
4 |
|
|
||||
|
5 |
|
Продолжение табл. 12.2
|
6 |
|
|
|
7 |
|
|
|
8 |
|
|
|
9 |
|
|
|
10 |
|
|
|
11 |
|
|
Окончание табл. 12.2
|
1 |
2 |
3 |
|
12 |
|
|
|
13 |
|
Библиографический список
1. Дьяконов В. П. Энциклопедия Mathcad 2001i и Mathcad 11 / В. П. Дьяконов М.: СОЛОН-пресс, 2004. 832 с.
2. Голубева Н. В. Основы математического моделирования систем и процессов: Учебное пособие / Н. В. Голубева / Омский гос. ун-т путей сообщения, Омск, 2006. 96 с.
3. Колдаев В. М. Численные методы и программирование: Учебное пособие / В. М. Колдаев. М.: ИД «Форум»: ИНФРА-М, 2008. 336 с.
4. Вержбицкий В. М. Основы численных методов: Учебник для вузов / В. М. Вержбицкий. М.: Высшая школа, 2002. 840 с.
5.Смирнов В. И. Курс высшей математики. Том 1: / В. И. Смирнов. СПб.: БВХ-Петербург, 2008. 642 с.
6. Мирошник И. В. Теория автоматического управления. Линейные системы / И.В. Мирошник. СПб: Питер, 2005. 336 с.
Учебное издание
ГОЛУБЕВА Нина Викторовна
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ
СИСТЕМ И ПРОЦЕССОВ
Часть 4
![]() Редактор Т. С. Паршикова
Редактор Т. С. Паршикова
* * *
Подписано в печать
.06.200. Формат 60![]() 84
84 ![]() .
.
Плоская печать. Бумага офсетная. Усл. печ. л. 2,0. Уч.- изд. л. 2,2.
Тираж 600 экз. Заказ .
* *
Редакционно-издательский отдел ОмГУПСа
Типография ОмГУПСа
*
644046, г. Омск, пр. Маркса, 35
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.