3- направление вдоль оси Z общей системы координат или Z1 местной системы координат.
4- поворот относительно оси Х общей системы координат или Х1 местной системы координат.
5- поворот относительно оси У общей системы координат или У1 местной системы координат.
6- поворот относительно оси Z общей системы координат
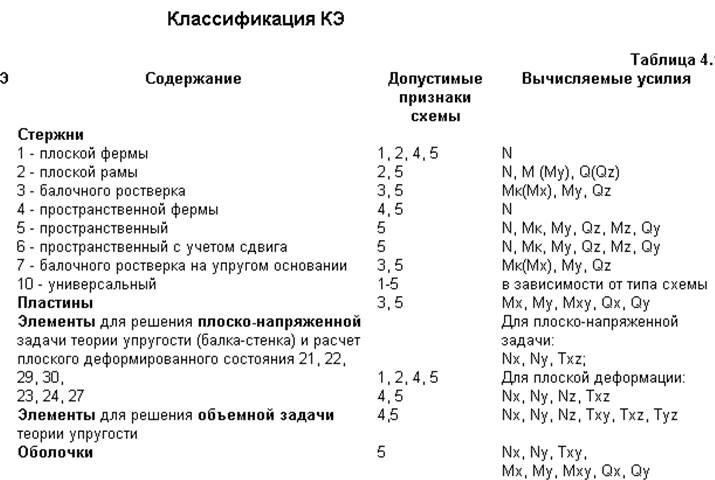
ТИП КЭ 1. СТЕРЖЕНЬ ПЛОСКОЙ ФЕРМЫ
Элемент предназначен для расчета плоских ферм.
Может располагаться лишь в плоскости Х0Z
В параллельной ей плоскости располагаться не может.
В каждом узле имеются 2 степени свободы:
линейные перемещения вдоль осей Х1, Z1.
Жесткостной характкристикой является величина ЕF.
Угол чистого вращения и жесткие вставки не задаются.
Допускаются следующие виды местных нагрузок:
5 1, 5 3,
6 1, 6 3, 7 3.
В результате расчета печатаются усилия N (в т).
при наличии местных нагрузок
для промежуточных сечений выпечатываются усилия N, Мy, Qz.
ТИП КЭ 2. СТЕРЖЕНЬ ПЛОСКОЙ РАМЫ
Элемент предназначен для расчета плоских рамных конс-трукций, располaгаемых вплоскости XOZ либо в параллельных ей плоскостях.
В каждом узле имеются три степени свободы:
линейные перемещения вдоль осей Х1, Z1
и угол поворота вокруг оси Y1.
Для данного типа КЭ угол чистого вращения в документе 3 не задаются.
Жесткостными характеристиками являются величины ЕF и EJ (в т, тм2).
Допускаются следующие виды местной нагрузки:
5 1, 5 3, 5 5,
6 1, 6 3,
7 3,
8 1, 8 5.
В результате расчета печатаются в сечениях упругой печатаются усилия N, М, Q (в т, тм).
Для вертикальных стержней ось Х1 местной системы координат параллельна оси Z. ось У1 местной системы координат параллельна оси У. .
Запрещено задавать местную нагрузку в направлении нуле-
вых жесткостей.
ТИП КЭ 3. СТЕРЖЕНЬ БАЛОЧНОГО РОСТВЕРКА
Элемент предназначен для расчета системы перекрестных
балок без учета продольных деформаций.
В каждом узле имеются три степени свободы:
линейное перемещение вдоль оси Z1 и углы поворота вокруг осей X1, Y1.
Для данной процедуры жесткостными характеристиками являются изгибная и крутильная жесткости сечения (EIy,GIкр).
Допускаются следующие виды местных нагрузок:
5 3, 5 4, 5 5,
6 3,
7 3,
8 5.
Результатами расчета сечениях упругой его выдаются усилия
М, Мк, Q (в т, тм).
Правило знаков соответствует правилу знаков усилий Мy, Мк, Qz
типа конечного элемента 5.
Местную нагрузку в направлении нулевых жесткостей зада-
вать запрещено.
ТИП КЭ 4. СТЕРЖЕНЬ ПРОСТРАНСТВЕННОЙ ФЕРМЫ
Элемент предназначен для расчета пространственных стержневых систем.
В каждом узле имеются три степени свободы:
линейные перемещения узла вдоль осей Х1,Y1, Z1.
Жесткостной характеристикой является величина EF (в т).
Угол чистого вращения и жесткие вставки не задаются.
Допускаются следующие виды местных нагрузок:
5 1, 5 2, 5 3,
6 1, 6 2, 6 3,
7 2, 7 3,
8 1.
Вычисляются усилия N (в т).
При наличии местных нагрузок для промежуточных сечений
печатаются усилия N, Мy, Qz, Мz, Qy (в т, тм).
ТИП КЭ 5. ПРОСТРАНСТВЕННЫЙ РАМНЫЙ СТЕРЖЕНЬ
Элемент преднaзначен для расчета произвольных пространственных стержневых систем без учета сдвиговой жесткости.
Последовательность нумерации узлов произвольная. По концамстержня могут быть абсолютно жесткие вставки разной длины.
В каждом узле имеются шесть степеней свободы:
Линейные перемещения узла вдоль осей
X1, Y1, Z1;
углы поворота узла вокруг осей
X1, Y1, Z1.
Положительное направление линейных перемещений совпада-
ет с направлением соответствующих осей.
Положительное направление угла поворота соответствует вращению узла против часовой стрелки, если смотреть с конца соответствующей оси.
С целью получения усилий в промежуточных сечениях до-
пускается дробление элемента на равные интервалы в пределах
упругой части (между абсолютно жесткими вставками).
Допускается наличие шарниров в местах примыкания к жестким вставкам
или к узлам, если в соответствующих местах отсутствуют жест-
кие вставки.
Местная система координат имеет следующую ориентацию
(. Ось X1 направлена от начала стержня (первый узел) к
концу (второй узел).
Оси Y1, Z1 - главные центральные оси инерции поперечного сечения стержня.
При этом оси X1, Y1, Z1 образуют правую тройку.
Положение местной системы координат полностью определяется задаваемыми координатами узлов стержня и третьей координатой (либо углом чистого вращения).
Координаты третьей точки (угол чистого вращения) обуславливаются разворотом главных осей инерции или параллельностью оси Y1 плоскости XOY.
Разворот главных осей инерции определяется углом между осью Y1 и осью а, который по абсолютной величине должен быть
меньше Pi/2.
Пложительный угол чистого вращения соответствует вращению оси А до совмещения с осью Y1 против часовой стрелки, если смотреть с конца оси X1,стрелки.
Ось А является результатом пересечения плоскости параллельной ХУ и плоскости Z1Y1 и направлена так, что если смотреть с ее конца, ось Z надо вращать до совмещения с X1 против часовой стрелки на угол < Pi.
Если X1 параллельно оси Z то оси а и Y1 параллельны оси Y и направлены в противоположную сторону.
Допускаются виды местных нагрузок:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.