2. Элементы теории систем управления.
 2.1. Понятие
переходных и установившихся процессов системы, устойчивость и ОС.
2.1. Понятие
переходных и установившихся процессов системы, устойчивость и ОС.
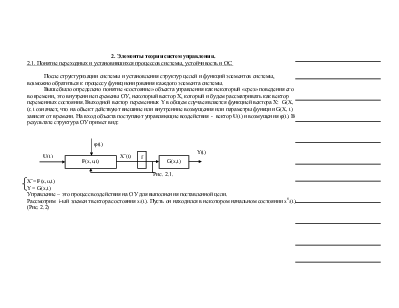
После структуризации системы и установления структур целей и функций элементов системы, возможно обратиться к процессу функционирования каждого элемента системы.
 Выше было определено понятие
«состояние» объекта управления как некоторый «срез» поведения его во времени,
это внутренние перемены ОУ, некоторый вектор Х, который и будем рассматривать
как вектор переменных состояния. Выходной вектор переменных Y
в общем случае является функцией вектора Х: G(X, t); t
означает, что на объект действуют внешние или внутренние возмущения или
параметры функции G(X, t) зависят от времени. На вход объекта поступают управляющие
воздействия - вектор U(t) и
возмущения j(t).
В результате структура ОУ примет вид:
Выше было определено понятие
«состояние» объекта управления как некоторый «срез» поведения его во времени,
это внутренние перемены ОУ, некоторый вектор Х, который и будем рассматривать
как вектор переменных состояния. Выходной вектор переменных Y
в общем случае является функцией вектора Х: G(X, t); t
означает, что на объект действуют внешние или внутренние возмущения или
параметры функции G(X, t) зависят от времени. На вход объекта поступают управляющие
воздействия - вектор U(t) и
возмущения j(t).
В результате структура ОУ примет вид:
![]() Рис. 2.1.
Рис. 2.1.
X˙= F(x,u,t)
Y = G(x,t)
Управление – это процесс воздействия на ОУ для выполнения поставленной цели.
Рассмотрим i-ый элемент вектора состояния xi(t). Пусть он находился в некотором начальном состоянии x0i(t) (Рис. 2.2)
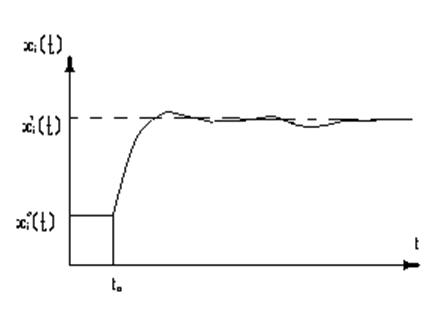
Рис. 2.2.
В момент времени t0 на систему подействовало управляющее или возмущающее воздействие. В результате ОУ перешел из состояния x0i(t) в состояние x1i(t). Этот переход объекта из одного состояния в другое и называется переходным процессом, это динамика ОУ. После завершения в ОУ переходного процесса в нем устанавливается новое состояние равновесия x1i(t). Это состояние называется установившимся процессом или статикой объекта.
Переходный процесс, показанный на рисунке 2.2, является устойчивым. Под устойчивостью будем понимать способность ОУ возвращаться в состояние равновесия (может быть не первоначальное) после действия на него управляющего или возмущающего воздействия. Обычно в результате действия на систему управления U(t) состояние равновесия будет новым, как показано на рисунке 2.2. Если же на объект действует возмущение (вредное воздействие j(t)), то требуется с помощью правильных управленческих решений вернуть объект в исходное состояние равновесия. (рис 2.3)
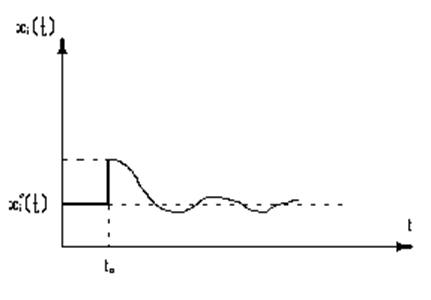
Рис. 2.3
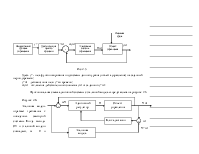
Основополагающим принципом управления является принцип обратной связи (ОС), который показан на рис 2.4.
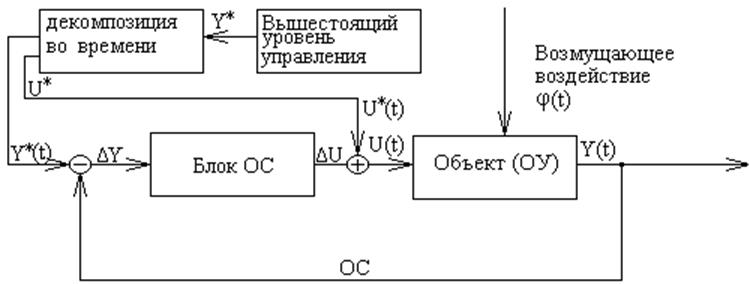
Y*(t) – задающее воздействие, желаемое поведение Y(t)
Рис. 2.4.
Желаемое поведение ОУ Y*, формируется вышестоящей системой управления (СУ). Задачей управляющей системы данного уровня иерархии является определение X*(t), и соответствующего ему U*(t), в блоке ОС определяется, ΔY(t)=Y*(t)-Y(t), и на основе этого рассогласования выработать меры воздействия на процесс функционирования ОУ такие, чтобы ΔY(t)=0. Для этого и служат ОС.
2.2. Управляемость, наблюдаемость, достижимость.
Под управляемостью системы
нижележащего уровня понимается ее способность выполнять цели и функции,
устанавливаемые системой вышестоящего уровня, в противном случае система
нижележащего уровня является неуправляемой по всем или части переменных
состояний. Это требует пересмотра ее структуры или полагаемых целей и функций.
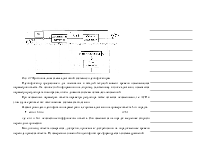
Если систему нижележащего уровня (объект управления) удается формализовать в виде системы линейных ОДУ, то факт управляемости (или неуправляемости) ОУ можно установить аналитически. Пусть имеем систему ОДУ вида:
Х=Ах+Bu, (2.1.)
Где Х – вектор переменных состояний, dim X=n,
U – вектор управляющих переменных, dim U=m;
А и В – постоянные матрицы, dim А=n*n, dim B=n*m.
Теорема 3.1. Критерии управляемости. Линейная стационарная система (2.1.), управляема тогда и только тогда, когда
Rank U=rank[ B, AB,…, An-1B]=n (2.2.)
V – матрица управляемости.
Если условие (2.2.) не выполняется, то управление U может влиять не на все переменные состояния ОУ. В этом случае возникает необходимость выделения управляемых и неуправляемыз переменных. Приведем алгоритм решения задачи. Пусть rank U=r. Это означает, что матрица управляемости имеет только r линейно независимых столбцов e1, e2,…,er. Сформируем матрицу Т по правилу: T=(T1, T2), dim T=n*n,
Где T1=(e1,…,er), T2=(er+1,…,en).
Здесь er+1,…,en – любые (n-r) независимых столбцов
Их можно выбрать, например, в виде:
Обсудим понятие наблюдаемости. Если система нижележащего уровня является «прозрачной» для системы вышестоящего уровня, т.е. эта система может «видеть» значения переменных состояния Х, то нижележащая система является наблюдаемой.
Все векторы li, i = 1,n должны составлять систему из n линейно-независимых векторов, т. е. ![]()
Сформулируем матрицу:
 ,
,
где матрица Q1
имеет r строк, а матрица Q2
имеет (n-r) строк. Вводя
преобразование координат ![]() , из системы
(2.1) получим:
, из системы
(2.1) получим:
где ![]() ,
,
![]() ,
, ![]() ,
,
![]()
|
|
где ![]() ,
,
![]()
Из системы (2.3)
видно, что подсистема (2.3 б) изменяется во времени в силу собственных свойств
матрицы ![]() и не зависит от управления U.
и не зависит от управления U.
Аналитически наблюдаемость можно установить, если известна модель объекта управления (ОУ) в виде:
|
![]() ,
,
![]() .
.
Теорема 2.2. Критерий наблюдаемости. Объект управления (2.4) является наблюдаемым тогда и только тогда, когда
Если rank S<n, то часть переменных Х является ненаблюдаемой. Имеется процедура, позволяющая выявить наблюдаемые и ненаблюдаемые переменные Х.
Достижимость. Состояние системы Х1 называется достижимым из состояния Х0, если существует такое состояние U(t), которое способно перевести систему из состояния Х0 в состояние Х1.
Критерий достижимости тот же, что и критерий управляемости. Эти понятия эквивалентны.
2.3. Элементы теории адаптивных систем
Любая сложная система работает не автономно, а в условиях действия агрессивной внешней среды, то есть такой среды, которая действует на сложную систему в направлении, изменяющем её поведение в сторону отклонений от требуемых значений выходных переменных. При этом характеристики сложной системы могут меняться заранее непредвиденным образом. Поэтому необходимо в структуре управления иметь управляющую подсистему, которая будет адаптировать поведение объекта к действиям внешней среды таким образом, чтобы поведение системы оставалось неизменным и соответствовало желаемому. При этом может меняться структура и параметры системы управления.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.