F1=filter(n1,d1,s1);
F2=filter(n2,d2,F1);
F3=filter(n3,d3,F2);
F4=filter(n4,d4,F3);
F5=filter(n5,d5,F4);
F6=filter(n6,d6,F5);
F7=filter(n7,d7,F6);
F8=filter(n8,d8,F7);
subplot(2,1,1), plot(i,s1)
title('Signal with frequency 9900 Hz' )
subplot(2,1,2), plot(i,F8)
title('Signal after filtering')
xlabel('N')
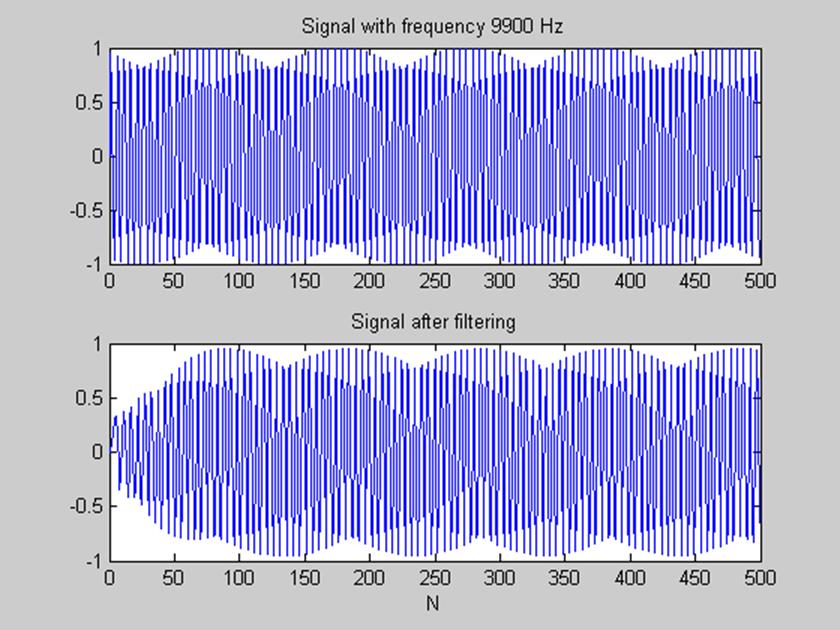
Рис. 15 Фильтрация сигнала с частотой 9900 Гц из полосы пропускания (10000 Гц)
По графикам, представленным на рис.15 видно, что такой сигнал фильтр пропускает без искажений, и лишь вначале может наблюдаться некоторое незначительное ослабление амплитуды выходного сигнала.
б) сигнал с частотой из полосы задерживания 11500 Гц.
s1=sin(2*pi*11500*Tt*i); %сигнал с частотой из полосы задерживания
F1=filter(n1,d1,s1);
F2=filter(n2,d2,F1);
F3=filter(n3,d3,F2);
F4=filter(n4,d4,F3);
F5=filter(n5,d5,F4);
F6=filter(n6,d6,F5);
F7=filter(n7,d7,F6);
F8=filter(n8,d8,F7);
subplot(2,1,1), plot(i,s1)
title('Signal with frequency 11500 Hz' )
subplot(2,1,2), plot(i,F8)
title('Signal after filtering')
xlabel('N')
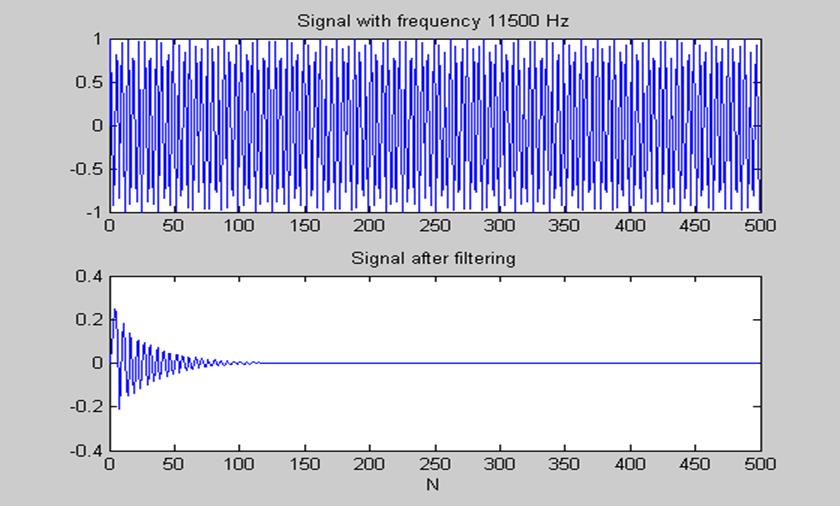
Рис.16 Фильтрация сигнала с частотой 11500 Гц из полосы задерживания
Глядя на рис.16, можно сказать, что фильтр практически не пропускает сигнал с частотой из полосы задерживания, как и ожидалось.
в) сигнал с частотой, находящейся в переходной полосе фильтра, 10500 Гц.
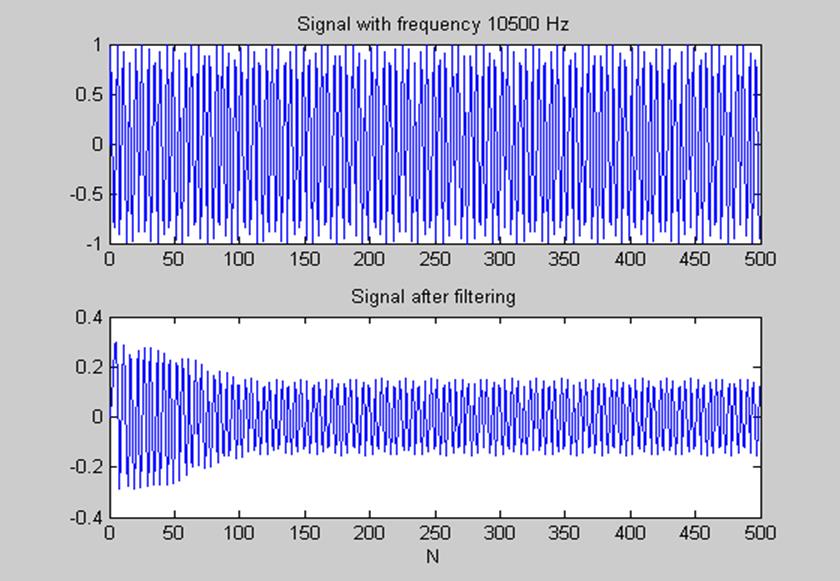
Рис.17 Фильтрация сигнала с частотой 10500 из переходной полосы(10000-11000 Гц)
При подаче на вход фильтра гармоники с частотой из переходной полосы наблюдается сильное ослабление выходного сигнала.
г) сигнал, представляющий собой сумму дискретных гармоник с частотами 11500 Гц (шум) и 9900 Гц (полезный сигнал).
x1=2*cos(2*pi*9900*i*Tt);
x2=2*cos(2*pi*11500*i*Tt);
x=x1+x2;
F1=filter(n1,d1,x);
F2=filter(n2,d2,F1);
F3=filter(n3,d3,F2);
F4=filter(n4,d4,F3);
F5=filter(n5,d5,F4);
F6=filter(n6,d6,F5);
F7=filter(n7,d7,F6);
F8=filter(n8,d8,F7);
subplot(4,1,1), plot(i,x1)
title('Signal with frequency 9900 Hz' )
subplot(4,1,2), plot(i,x2)
title('Signal with frequency 11500 Hz' )
subplot(4,1,3), plot(i,x),axis([0 ,500,-5 ,5 ])
title('Resulting signal'),
subplot(4,1,4), plot(i,F8)
title('Signal after filtering')
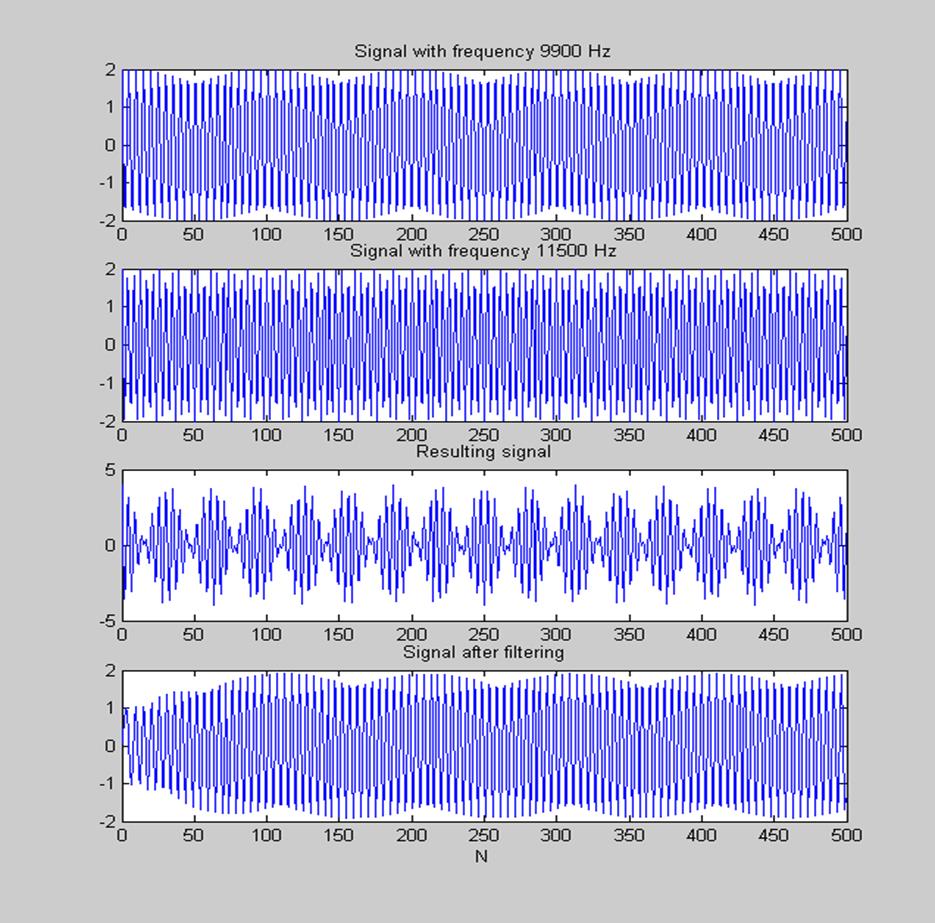
Рис. 18.Сигналы с частотами 9900 и 11500Гц, суммарный сигнал и сигнал на выходе фильтра
Из графика видно, что фильтр хорошо пропускает низкочастотную составляющую и подавляет высокочастотные помехи.
По результатам тестирования можно сделать выводы:
фильтр пропускает гармоники сигнала, входящие в полосу пропускания фильтра (0-10000Гц),
с относительно большим ослаблением пропускает гармоники, частоты которых входят в переходную полосу фильтра (от 10000 Гц до 11000 Гц),
практически не пропускает гармоники, входящие в полосу задерживания (от 11000 Гц).
Для оценки быстродействия полученного фильтра была разработана программа на языке C++, в качестве компилятора использовался Microsoft Visual C++ 6.0.
Листинг программы:
#include <stdio.h>
#include <iostream.h>
#include <math.h>
#include <windows.h>
#include <conio.h>
#define MAXS 100000 // максимальная размерность массивов входного и выходного сигналов
#define N 20000 // число отсчетов
int por=2; // порядок фильтров для каскадной формы
short b,B,a,A; // переменные для вычисления отсчетов выходного сигнала
short pi=3.1415;
short Fd=20000;
short Td=1/Fd;
short y[MAXS]; // массив для формирования отсчетов выходного сигнала
short x[MAXS]; // массив для формирования отсчетов входного сигнала
short exit1[MAXS]; // массивы передачи сигнала между элементами
short exit2[MAXS]; // каскадной формы фильтра
short exit3[MAXS];
short exit4[MAXS];
short exit5[MAXS];
short exit6[MAXS];
short exit7[MAXS];
short exit8[MAXS];
short X1[3]={ 0.0129 0.0251 0.0129 }; // коэффициенты полиномов числителя ПФ фильтра 2-го порядка
short Y1[3]={ 1.0000 0.4920 0.0712}; // коэффициенты полиномов знаменателя ПФ фильтра 2-го порядка
short X2[3]={ 1.0000 1.5602 1.0000 };
short Y2[3]={ 1.0000 0.3965 0.1286 };
short X3[3]={ 1.0000 1.0172 1.0000};
short Y3[3]={ 1.0000 0.2323 0.2300 };
short X4[3]={ 1.0000 0.5158 1.0000 };
short Y4[3]={ 1.0000 0.0373 0.3566 };
short X5 [3]={ 1.0000 0.1323 1.0000 };
short Y5[3]={ 1.0000 -0.1555 0.4933 };
short X6[3]={ 1.0000 -0.1310 1.0000 };
short Y6[3]={ 1.0000 -0.3247 0.6320 };
short X7[3]={ 1.0000 -0.2923 1.0000 };
short Y7[3]={ 1.0000 -0.4590 0.7724};
short X8[3]={ 1.0000 -0.3686 1.0000 };
short Y8[3]={ 1.0000 -0.5526 0.9200 };
short OS(short x[],int n, short m1[],short m2[]) // функция расчета выходного сигнала фильтра 2-го порядка
{
for(int i=0;i<por+1;i++)
{
b=m1[i]*x[n-i];
B=b+B;
}
for(i=1;i<por+1;i++)
{
a=m2[i]*y[n-i];
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.