Разности расстояний ΔRi (i=1,2,3) измеряют интегральным доплеровским методом. Суть его состоит в том, что интегрируется доплеровский сдвиг частоты принятого от НИСЗ радиосигнала за фиксированное время Т.
Доплеровский сдвиг частоты F определяется относительно частоты опорного генератора потребителя:
![]() ,
(6.1) где f0 – номинальная частота
передатчика НИСЗ;
,
(6.1) где f0 – номинальная частота
передатчика НИСЗ;
Δf0 – фиксированный сдвиг частоты, выбираемый из условия Δf0>Fмакс (Fмакс – максимально возможный доплеровский сдвиг частоты);
Δf – неизвестный частотный сдвиг, обусловленный нестабильностью частоты передатчика НИСЗ и опорного генератора потребителя.
С учетом вводимого сдвига и нестабильности частот генераторов разность расстояний:
![]() , (6.2)
, (6.2)
где N0=Δf0T – постоянная составляющая доплеровского отсчета, обусловленная известным сдвигом частоты Δf0;
NT – системная ошибка отсчета, обусловленная неизвестным сдвигом частот Δf.
Принцип работы навигационной аппаратуры спутника “Транзит” заключается в следующем (Рис. 6.4).
Высокостабильный кварцевый стандарт частоты 5 МГц формирует метки времени для блока памяти, коммутирующего устройства, фазового модулятора и приемника. Несущие частоты 400 и 150 МГц формируются путем умножения частоты в 80 и 30 раз. Фазовый модулятор осуществляет манипуляцию несущих данными, хранящимися в БП. Методом фазовой модуляции двоичным кодом предаются: код идентификации НИСЗ, двухминутные метки времени (синхросигнал), постоянные и переменные параметры орбиты спутника на каждую четную минуту 16- часового интервала, телеметрическая и др. информация.
Коммутирующее устройство подключает БП к фазовому модулятору при передаче данных о параметрах орбиты НИСЗ (при передаче меток времени, телеметрической информации блок памяти отключается).
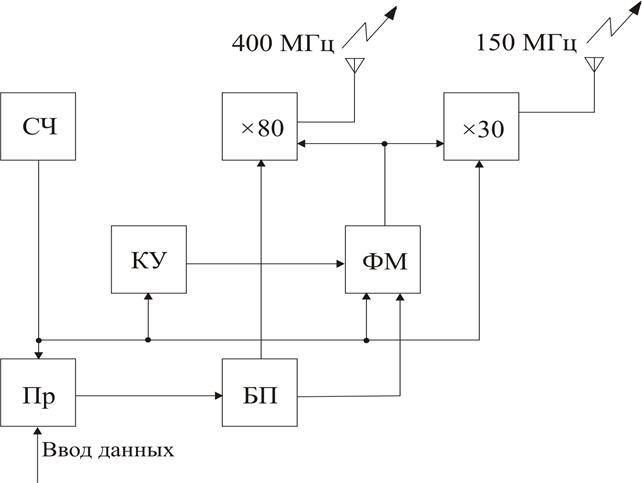
Рис. 6.4 – Структурная схема навигационной аппаратуры спутника “Транзит”: СЧ – синтезатор частот; БП – блок памяти;
Пр – приемник; КУ – коммутирующее устройство;
ФМ – фазовый модулятор; xm – умножитель частоты в m раз.
Принцип работы навигационной аппаратуры потребителя доплеровской СРНС (Рис. 6.5) заключается в следующем.
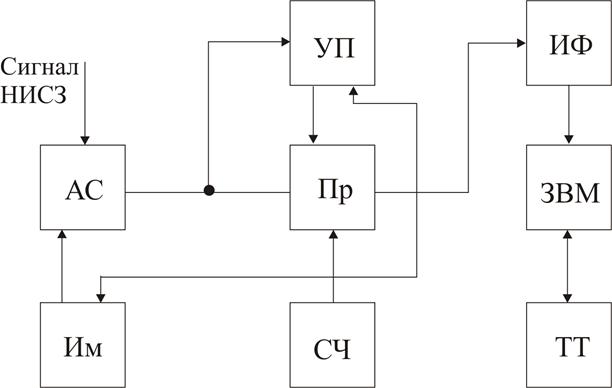
Рис. 6.5 – Структурная схема аппаратуры потребителя доплеровской СРНС:
АС – антенная система; СЧ – стандарт частоты и синтезатор;
Пр – приемник; ИФ – интерфейс; ТТ – телетайп с печатающим устройством; Им – имитатор; УП – устройство поиска.
Антенная система включает две антенны (для каналов 400 и 150 МГц), два пассивных фильтра и антенных усилителя. Стандарт частоты и синтезатор формирует сетку высокостабильных частот, используя колебание опорного
кварцевого генератора. Имитатор используют для испытания приемника и проверки точности определения местоположения в отсутствие радиосигнала от спутника.
Устройство поиска обеспечивает автоматический поиск сигнала по частоте и слежения за ним во время приема. Кроме того, он имитирует слежение при потере сигнала (во время замирания) до тех пор, пока сигнал вновь не появится.
Приемник выполняется по схеме супергетеродинного приемника с двойным преобразованием частоты. Основу приемника составляет система фазовой автоподстройки частоты (ФАПЧ), отслеживающая доплеровский сдвиг частоты F1 и F2 для каналов 400 и 150 МГц относительно опорного колебания, вырабатываемого синтезатором. Эквивалентная шумовая полоса системы ФАПЧ выбирается из условия минимизации полной ошибки измерения радионавигационного параметра. Уменьшение шумовой полосы влечет уменьшение шумовой составляющей ошибки. Однако при этом возрастает динамическая ошибка, обусловленная инерционностью системы ФАПЧ (система не успевает отслеживать перемещения потребителя). Оптимальные значения шумовой полосы зависят от типа потребителя, его маневренных возможностей, уровня помех и прочих факторов и составляет 20-50 Гц.
Сигналы с выхода приемника (доплеровские сдвиги частоты, двухминутные метки времени и т.д.) преобразованные в двоичный код, поступают в вычислительное устройство. На основании этих данных, а также данных о скорости, курсе и высоте потребителя, получаемых от других бортовых навигационных средств, ЭВМ решает навигационные уравнения, определяя координаты потребителя и текущее время.
Факторы, определяющие точность доплеровских СРНС:
- ошибки вычисления и прогнозирования параметров орбит НИСЗ;
- естественные и искусственные помехи;
- нестабильность частоты бортовых опорных генераторов НИСЗ и потребителя;
- аппаратурные ошибки;
- многолучевость распространения радиоволн;
- рефракция радиоволн в ионосфере и тропосфере;
- неточность вводимых в ЭВМ данных о скорости, курсе и высоте потребителя.
Таким образом, опираясь на структурную схему потребителя доплеровской СРНС, функциональная схема следящей системы выглядит следующим образом (Рис.6.6):
Рис. 6.6 – Функциональная схема следящей системы
6.1 Список используемых сокращений
А – антенна
АС – антенная система
АД – амплитудный детектор
ГНП – генератор непрерывного поиска
ГСИ – генератор селекторных импульсов
ИМ – имитатор
ИФ - интерфейс
ИЧ – измеритель частоты
МШУ – малошумящий усилитель
ПГ – пороговый генератор
ПР - приемник
ПУ – пороговое устройство
СМ– смеситель
СЧ – стандарт частоты и синтезатор
ТТ – телетайп с печатающим устройством
УП – устройство поиска
УПЧ – усилитель промежуточной частоты
ФНЧ – фильтр низких частот
ЧД – частотный детектор
ЭВМ – электронно-вычислительная машина
7. Перечень использованной литературы
1. Бондаренко В.Н. Радиоавтоматика: методические указания по курсовому проектированию студентов специальности 2301 –«Радиотехника»; КрПИ. Красноярск, 1992. 32 с.
2. Бондаренко В.Н. Теория управления и радиоавтоматика: Учебное пособие. Красноярск: КГТУ, 1999. 139 с.
3. Первачев С.В. Радиоавтоматика: М.: Радио и связь. 1982. 296 с.
4. Коновалов Г. Ф. Радиоавтоматика: Учеб. для вузов по спец. «Радиотехника». – М.: Высш. шк., 1990. – 335 с.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.