 (3.6)
(3.6)
где ![]()
![]() -
полиномы; (3.7)
-
полиномы; (3.7)
n- порядок дифференциального уравнения, описывающего систему.
3.2 Определение оптимального значения шумовой полосы
Нахождение шумовой полосы системы и дисперсии шумовой ошибки сводится к вычислению интеграла:
 , (3.8)
, (3.8)
значение которого при n=2:
 (3.9)
(3.9)
Заменим в выражении (2.3) параметр p на jω. Получим:
 (3.10)
(3.10)
Представим выражение (3.10) в виде (3.6):
 (3.11)
(3.11)
Отсюда получаем:
![]()
![]()
В соответствии с выражением (3.7) получаем:
a0=1; a1=KT; a2=K
b0=-K2T2; b1=K2.
Подставим полученные коэффициенты в (3.9):

Найдем шумовую полосу:
 (3.12)
(3.12)
 (3.13)
(3.13)
Дисперсия шумовой ошибки:
 (3.14)
(3.14)
Подставим выражения (3.2) и (3.14) в (3.5):
 (3.15)
(3.15)
Выполнив математические преобразования, получим:
 (3.16)
(3.16)
 , с-2
, с-2
Зная величину Kиopt по формуле (3.13) рассчитываем оптимальное значение шумовой полосы Fшoptсистемы:
 , Гц
, Гц
По формуле (3.1) определяем минимально
достижимую ошибку слежения: 
3.3 Построение графика зависимости ошибок слежения от полосы пропускания системы
Для построения графика зависимости
![]() , необходимо установить связь между
, необходимо установить связь между ![]() и
и ![]() через
коэффициент К:
через
коэффициент К:
 (3.17)
(3.17)
Опираясь на выражение (3.2), получаем:
 (3.18)
(3.18)
 , Гц (3.19)
, Гц (3.19)
Дисперсия шумовой ошибки определяется по формуле (3.3):
 , Гц2
, Гц2
Рис. 3.1 - График зависимости ошибок слежения от полосы пропускания системы:
![]() -
- ![]() - квадрат динамической ошибки
- квадрат динамической ошибки
_ _ _ _ _ - ![]() - дисперсия шумовой ошибки
- дисперсия шумовой ошибки
__ __ __ - ![]() - результирующая ошибка
- результирующая ошибка
4. Построение ЛАХ и ЛФХ разомкнутой системы
4.1 Логарифмическая амплитудно-частотная характеристика
Для определения запаса устойчивости системы построим логарифмическую амплитудно-частотную и фазо-частотную характеристики, по которым установим запас по усилению и фазе.
Передаточная функция разомкнутой системы имеет вид:
 ,
(4.1)
,
(4.1)
где Киopt![]()
kд =0,1 В/Гц
T =0,8 c
Из исходных данных известно, что передаточная функция разомкнутой системы задается 1 форсирующим звеном (m=1) и двумя интегрирующими (k=2).
Тогда ЛАХ разомкнутой системы имеет вид:
 (4.2)
(4.2)
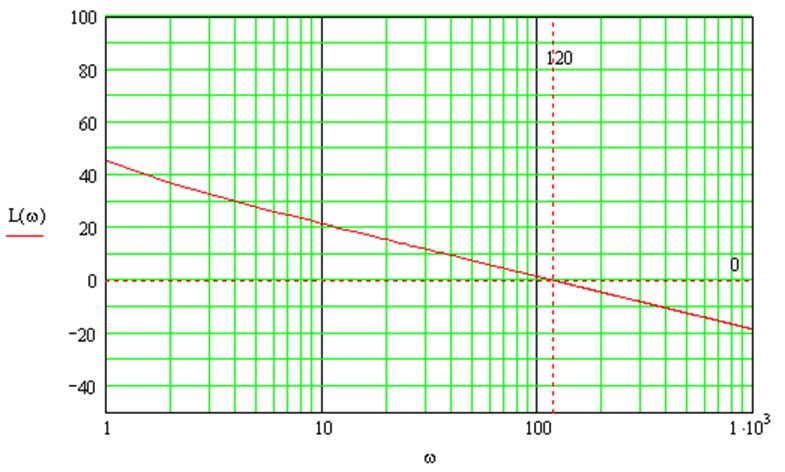
Рис. 4.1 – ЛАХ разомкнутой системы
4.2 Логарифмическая фазо-частотная характеристика
ЛФХ разомкнутой системы имеет вид:
 (4.3)
(4.3)
Рис. 4.2 – ЛФХ разомкнутой системы
4.3 Определение запаса устойчивости по амплитуде и фазе при оптимальном значении параметра Ки
Запас по амплитуде (усилению) численно
равен значению ЛАХ на критической частоте, т. е. частоте, на которой ЛФХ равна
-π рад. Из Рис. 4.2 видно, что ЛФХ не пресекает горизонтальную
прямую ![]() , значит запас по амплитуде
(усилению) ΔL не имеет смысла определять.
, значит запас по амплитуде
(усилению) ΔL не имеет смысла определять.
Тогда запас устойчивости определяется одним показателем – запасом по фазе.
Запас по фазе определяется как:
![]() (4.4)
(4.4)
Из Рис. 4.1 и Рис. 4.2 видно, что запас по фазе составляет Δφ≈1,56 рад.
Считаем, что система является устойчивой,
так как полученный запас по фазе Δφ удовлетворяет условию Δφ![]() π/6.
π/6.
5. Цифровое моделирование следящей системы
Для моделирования линейной непрерывной системы по её передаточной функции воспользуемся методом билинейного преобразования. Суть его состоит в том, что непрерывные интегрирующие звенья, входящих в систему, заменяют дискретными интеграторами, осуществляющими интегрирование по методу трапеций.
Дискретная передаточная функция цифровой
модели следящей системы при использовании метода билинейного преобразования
получается из передаточной функции замкнутой непрерывной системы ![]() путем замены оператора
непрерывного интегрирования:
путем замены оператора
непрерывного интегрирования:
 ,
(5.1)
,
(5.1)
где Тд – интервал дискретизации, выбираемый в соответствии с теоремой Котельникова из условия:
 (5.2)
(5.2)
Полученную в результате дискретной аппроксимации (5.1) передаточную функцию цифровой модели системы необходимо представить в виде:
 (5.3)
(5.3)
Передаточной функции (5.3) соответствует разностное уравнение:
 ,
(5.4)
,
(5.4)
являющееся цифровой моделью следящей системы.
Для определения характеристик следящей системы в переходном режиме воспользуемся другой формой разностного уравнения:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.