 , (11)
, (11)
где![]() - максимальная частота
сигнала, подвергающаяся анализу.
- максимальная частота
сигнала, подвергающаяся анализу.
Она определяется из требований ТЗ и из частот свободных колебаний ОК. В идеале, она должна быть верхней частотой подавления входного полосового фильтра.
Следующий шаг – нормировка шкалы АЦП к оперируемым процессором
величинам. Этот шаг обязателен из-за возможности появления переполнения при
вычислении ДПФ. Далее пронормированный вектор подвергается дискретному
преобразованию Фурье. Рассмотрим этот вопрос более подробно. В результате
применения ДПФ к вещественному вектору ![]() получаем
комплексный вектор той же длины
получаем
комплексный вектор той же длины ![]() через следующее
выражение:
через следующее
выражение:
 (12)
(12)
В данном рассуждении под длиной вектора понимается число его координат, а не евклидова норма. Существует также обратное преобразование Фурье (операция, обратная только что описанной), но здесь оно рассматриваться не будет ввиду его отсутствия в алгоритме.
Непосредственное вычисление координат результирующего вектора через
(12) приводит к 2N операциям
на каждый коэффициент ![]() . Т.к. всего мы имеем N коэффициентов, то общая
сложность алгоритма составляет
. Т.к. всего мы имеем N коэффициентов, то общая
сложность алгоритма составляет ![]() , что не
представляет практического интереса из-за необходимости реализации данного
алгоритма на МК и следующей отсюда низкой скорости вычислений. В таких случаях
применяют быстрое преобразование Фурье, которое характеризуется значительно
меньшим объемом операций на вычисление одной компоненты результирующего
вектора.
, что не
представляет практического интереса из-за необходимости реализации данного
алгоритма на МК и следующей отсюда низкой скорости вычислений. В таких случаях
применяют быстрое преобразование Фурье, которое характеризуется значительно
меньшим объемом операций на вычисление одной компоненты результирующего
вектора.
Будем использовать алгоритмы с основанием 2, использующиеся, когда
число входных отсчетов равно ![]() . Основная идея,
лежащая в их основе, заключается в сведении вычисления N-точечного
БПФ к вычислению нескольких
. Основная идея,
лежащая в их основе, заключается в сведении вычисления N-точечного
БПФ к вычислению нескольких ![]() -точечных ДПФ при
-точечных ДПФ при ![]() .
.
Выражение (12) можно также переписать как
 , (13)
, (13)
где  .
. ![]() здесь
– главный комплексный корень N-степени из единицы. В
некоторых случаях индекс N будет
опускаться, что будет означать степень корня, равную длине преобразуемого
вектора.
здесь
– главный комплексный корень N-степени из единицы. В
некоторых случаях индекс N будет
опускаться, что будет означать степень корня, равную длине преобразуемого
вектора.
В итоге, идею БПФ можно записать так
 , (14)
, (14)
что соответствует разбиению искомой последовательности на две
подпоследовательности соответственно четных и нечетных отсчетов входного
сигнала. В свою очередь, каждую из подпоследовательностей длины N/2 можно представить двумя подпоследовательностями
длиной N/4 и так далее, пока не останутся 2-х точечные.
Всего таких ступеней преобразования ![]() . Сложность
алгоритма слияния на каждой ступени равна
. Сложность
алгоритма слияния на каждой ступени равна ![]() .
Умножая на число ступеней, получаем сложность всего алгоритма равную
.
Умножая на число ступеней, получаем сложность всего алгоритма равную ![]() . Такой алгоритм БПФ использует
прореживание по времени, разделяя вектор входного сигнала на четные и нечетные
компоненты.
. Такой алгоритм БПФ использует
прореживание по времени, разделяя вектор входного сигнала на четные и нечетные
компоненты.
Вышеописанный алгоритм используется в данной работе как базовый алгоритм для вычисления ДПФ. Блок-схема данного алгоритма приведена в приложении Б.
Далее выполняется статистическая нормировка полученных после БПФ модулей гармоник сигнала, в соответствие с выражением (15)
 , (15)
, (15)
где ![]() - длина вектора модулей гармоник;
- длина вектора модулей гармоник;
![]() -
модуль гармоники i;
-
модуль гармоники i;
![]() - среднее арифметическое
входного вектора.
- среднее арифметическое
входного вектора.
В результате применения (15) к исходному вектору действительных величин X получаем вектор действительных величин Y со следующими параметрами (16)
![]() , (16)
, (16)
где
D – дисперсия;
M – математическое ожидание.
Необходимость данной нормировки обосновывается требованием к представлению обучающих выборок для нейроэмулятора «Модели», который будет описан далее в части «выбор нейроэмулятора».
Будем использовать нейронную сеть (НС) со структурой, показанной на рисунке 8.
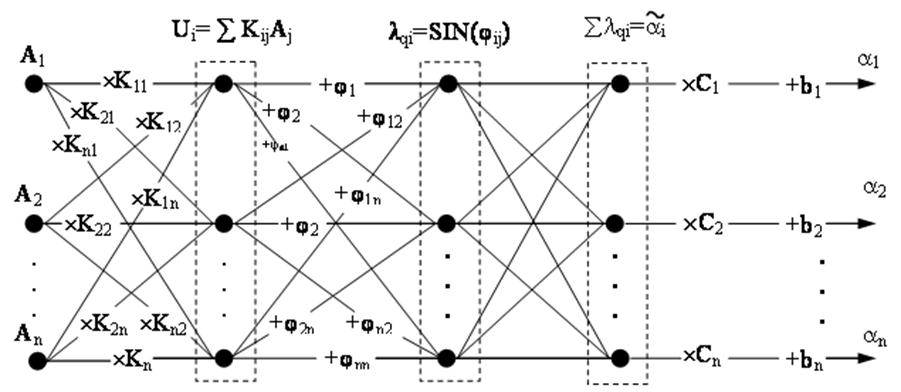
Рисунок 8 - Структура используемой НС
Как показано в /7/, такая структура НС называется персептроном, используемым для распознавания образов. Функционирование такой НС описывается выражением (17) (запись для однослойного персептрона).
 , (17)
, (17)
где N – число нейронов;
M – число входов;
A – вектор входных данных;
K – матрица синаптических коэффициентов;
C – вектор коэффициентов взвешенного суммирования выходов нейронов;
![]() – вектор начальных состояний нейронов;
– вектор начальных состояний нейронов;
b – постоянная составляющая выхода.
Выходом данной НС является вещественное число.
Стоит отметить, что разработанные исходные коды приведены в приложении В.
Перед рассмотрением вопроса выбора МК рассмотрим иерархию программных средств работы с МК, что необходимо для дальнейшего понимания материала, посвященного тестовым задачам МК.
На рисунке 9 представлена иерархия программных средств работы с МК.
Рисунок 9 - Иерархия программных средств работы с МК
Как видно из диаграммы, программные средства работы с МК подразделяются на средства разработки, средства отладки, и средства аппаратно-программного взаимодействия.
- Средства разработки предназначены непосредственно для написания программ. Сюда входят компиляторы ассемблера и языков высокого уровня, декомпиляторы (программные средства, позволяющие получить ассемблерный листинг или код на высокоуровневом языке программирования, имея бинарный файл прошивки МК), а также интегрированные среды разработки (IDE – Integrated Development Environment), представляющие собой многокомпонентные приложения, совмещающие компиляторы (как ассемблера, так и высокого уровня), средства редактирования и контроля исходных текстов, декомпиляторы, средства отладки – т.е. весь комплекс прикладных программ в процессе разработки. Поэтому IDE относят к средствам отладки и средствам разработки.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.