 (2.24)
(2.24)
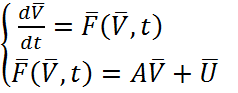
где А – матрица Якоби динамической системы,
![]() вектор фазовых
координат,
вектор фазовых
координат,
![]() вектор невязок,
вектор невязок,
![]() вектор функции внешних
воздействий.
вектор функции внешних
воздействий.
С учетом произведенных ранее расчетов запишем систему дифференциальных уравнений, составляющую динамическую гидросистему:
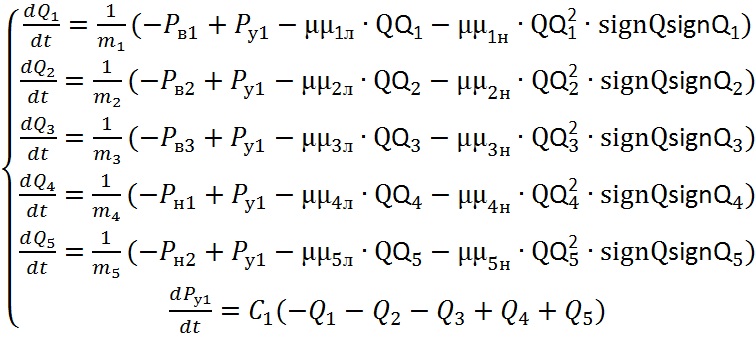 (2.25)
(2.25)
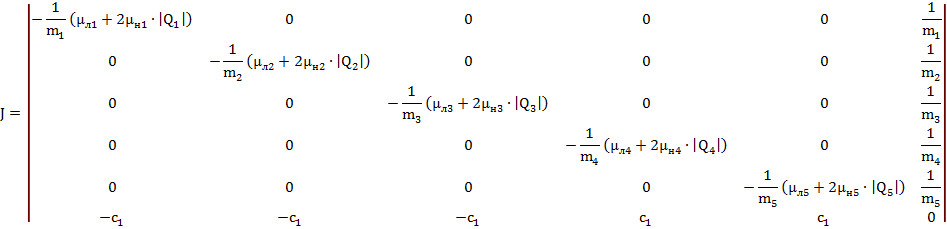
Так как система дифференциальных уравнений нелинейная, то элементами матрицы Якоби являются частные производные по фазовым координатам:
Переходную характеристику определяют в результате численного интегрирования системы дифференциальных уравнений, для чего необходимо провести выбор ряда параметров.
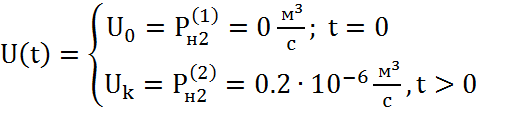
Пусть переходный процесс оценивается как реакция системы, находящейся в состоянии покоя на ступенчатое воздействие вида:
 (2.26)
(2.26)
где ![]() и
и ![]() – начальные и конечные
значения функции воздействия u(t),
причем
– начальные и конечные
значения функции воздействия u(t),
причем ![]() и
и ![]() –
const .
–
const .
Начальные и конечные значения всех фазовых координат определены при анализе статического состояния (таблица 2.5)
 ,
,  ,
,  (2.27)
(2.27)
Если система устойчивая, то через некоторый промежуток времени система придет из состояния V0 в состояние Vk. Для численного интегрирования будем использовать неявный метод Эйлера. Вектор входных воздействий при t≥0 имеет вид:
 (2.28)
(2.28)
Формула численного интегрирования метода Эйлера имеет вид:
 (2.29)
(2.29)
Совместное преобразование двух последних выражений приводят к записи:
![]() (2.30)
(2.30)
где
![]() – модифицированная
матрица Якоби на (к+1) шаге, которая формируется по следующим правилам:
– модифицированная
матрица Якоби на (к+1) шаге, которая формируется по следующим правилам:
Диагональные элементы матрицы Якоби на k-ом шаге пересчитываются по формуле:
 (2.31)
(2.31)
Остальные элементы не изменяются:
 (2.32)
(2.32)
![]() – модифицированный
вектор входных воздействий на k+1
шаге.
– модифицированный
вектор входных воздействий на k+1
шаге.
 (2.33)
(2.33)
Решение системы
уравнений дает значение фазовых координат на к+1 шаге, т. е. в момент времени ![]() .
.
Алгоритм неявного метода Эйлера с постоянным шагом интегрирования h:
1) задание шага интегрирования h
2) задание начальных
значений переменных ![]() при t0=0;
при t0=0;
3) вычисление времени tk+1=tk+h, где k=0,1,2… ;
4) вычисление матриц ![]() и
и
![]() на к+1 шаге
на к+1 шаге
5) Решение системы
уравнений ![]() с целью определения
с целью определения ![]() в момент времени tk+1;
в момент времени tk+1;
6) Переход к этапу 3 до
тех пор, пока в случае устойчивой системы фазовые координаты не достигнут
состояния конечного значения![]() или не будут
доказательства неустойчивой системы.
или не будут
доказательства неустойчивой системы.
Начальные значения
вектора ![]() определяется на
основании входных воздействий системы. В качестве начальных значений фазовых
переменных берем вектор начальных значений
определяется на
основании входных воздействий системы. В качестве начальных значений фазовых
переменных берем вектор начальных значений ![]() .
.
![]() (2.34)
(2.34)
Переходные процессы гидросистемы представлены на рисунке 2.4 и рисунке 2.5.
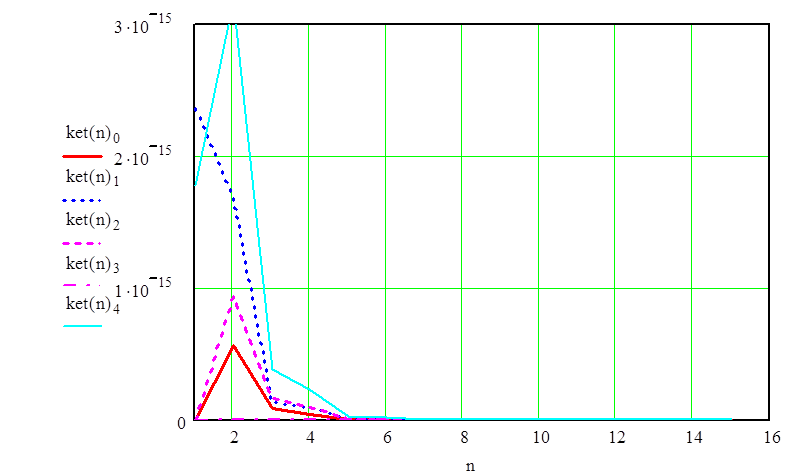
Рисунок 2.4 – Переходные процессы расходов Q1, Q2, Q3, Q4,Q5
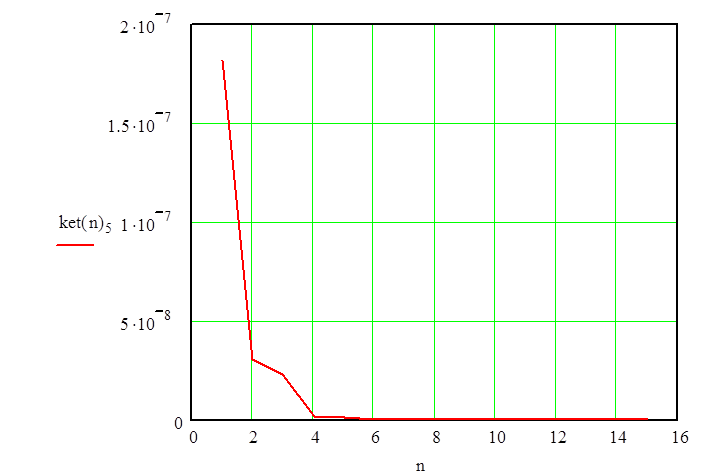
Рисунок 2.5 – Переходный процесс гидросистемы
ЗАКЛЮЧЕНИЕ
В ходе выполнения курсовой работы произведено моделирование на
микроуровне и макроуровне.
Изучена теория систем с распределенными параметрами применительно к конкретной выбранной задаче математической физики, произведен расчет выходной распределенной величины, интегральной передаточной функции, построены логарифмическая характеристика и ее аппроксимация стандартными типовыми наклонами.
На стадии моделировании на макроуровне исследовали статическую и динамическую модель гидросистемы. Решена система дифференциальных уравнений статической модели методом Ньютона, а динамическую модель рассчитали методом Эйлера. Построен переходной процесс системы.
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
1. Бутковский А.Г., Характеристики систем с распределенными параметрами. Наука, 1979.-224с.
2. Бессекерский В.А., Попов Н.П. Теория систем автоматического регулирования. М.; Наука 1966.-992с
3. Власов В.В. Синтез интегральной передаточной функции для объектов управления с распределенными параметрами. //Школа академика Власова: Сб. метод, тр-М.,Буркин, 1998.-128с.
ПРИЛОЖЕНИЕ А
(Обязательное)
Графическая часть.
1 Моделирование на микроуровне. Идентификация краевой задачи 31
2 Расчет выходной распределенной величины 32
3 Расчет динамической характеристики 33
4 Моделирование на макроуровне. Исходные данные 34
5 Графические формы математической модели гидравлической системы 35
6 Расчет статического режима работы гидросистемы 36
7 Расчет динамического режима работы гидросистемы 37
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.