







































Министерство образования Российской Федерации
Государственное образовательное учреждение высшего профессионального образования
САМАРСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Кафедра «Электропривод и промышленная автоматика»
ЗАДАНИЯ И МЕТОДИЧЕСКИЕ УКАЗАНИЯ
к выполнению курсового проекта
по дисциплине «Системы управления электроприводов»
для студентов 4 курса специальности 140604
Тема: «Расчет позиционно-следящего электропривода
постоянного тока»
САМАРА 2011
Составитель:
УДК 62-50
Задания и методические указания к выполнению курсового проекта по дисциплине «Системы управления электроприводов» для студентов специальности 140604 (дневное обучение) / сост. А. В. Стариков. – Самара: СамГТУ, 2011. – 47 с.
Приведены задания и методические указания по инженерному расчету цифровых и цифроаналоговых позиционно-следящих электроприводов постоянного тока
Рассчитаны на студентов дневного обучения специальности 140604 «Электропривод и промышленная автоматика».
Табл.1. Ил. 10. Библиогр. 5 назв.
Цель курсового проекта
Целью курсового проекта является освоение инженерных методов расчета цифровых и цифроаналоговых систем следящих электроприводов.
ЗАДАЧИ КУРСОВОГО ПРОЕКТА
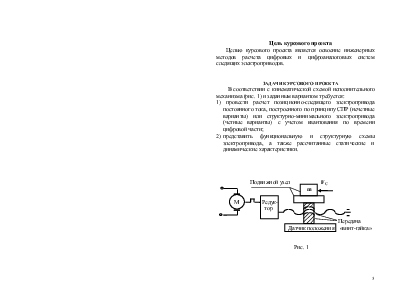
В соответствии с кинематической схемой исполнительного механизма (рис. 1) и заданным вариантом требуется:
1) провести расчет позиционно-следящего электропривода постоянного тока, построенного по принципу СПР (нечетные варианты) или структурно-минимального электропривода (четные варианты) с учетом квантования по времени цифровой части;
2) представить функциональную и структурную схемы электропривода, а также рассчитанные статические и динамические характеристики.
Рис. 1
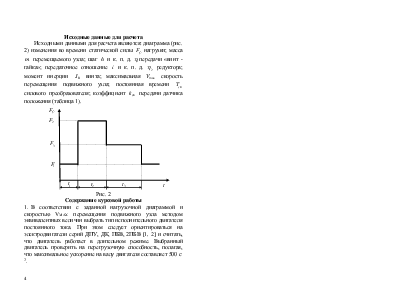
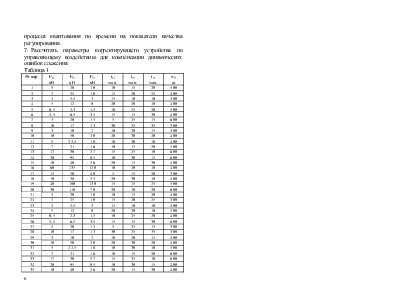
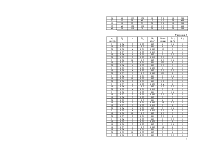
Исходными данными для расчета являются: диаграмма
(рис. 2) изменения во времени статической силы ![]() нагрузки;
масса
нагрузки;
масса ![]() перемещаемого
узла; шаг
перемещаемого
узла; шаг ![]() и
к. п. д.
и
к. п. д. ![]() передачи
«винт - гайка»; передаточное отношение
передачи
«винт - гайка»; передаточное отношение ![]() и к.
п. д.
и к.
п. д. ![]() редуктора;
момент инерции
редуктора;
момент инерции ![]() винта;
максимальная
винта;
максимальная ![]() скорость
перемещения подвижного узла; постоянная времени
скорость
перемещения подвижного узла; постоянная времени ![]() силового преобразователя; коэффициент
силового преобразователя; коэффициент ![]() передачи
датчика положения (таблица 1).
передачи
датчика положения (таблица 1).
Рис. 2
Содержание курсовой работы
1. В соответствии с заданной нагрузочной диаграммой и скоростью VMAX перемещения подвижного узла методом эквивалентных величин выбрать тип исполнительного двигателя постоянного тока. При этом следует ориентироваться на электродвигатели серий ДПУ, ДК, ПБВ, 2ПБВ [1, 2] и считать, что двигатель работает в длительном режиме. Выбранный двигатель проверить на перегрузочную способность, полагая, что максимальное ускорение на валу двигателя составляет 500 с-2.
2. Определить параметры передаточных функций электродвигателя и силового преобразователя. При этом считать, что максимальное входное напряжение (для нечетных вариантов) на входе системы импульсно-фазового управления силового преобразователя равно 10 В, а максимальное выходное напряжение силового преобразователя (тиристорного) равно сумме номинального напряжения электродвигателя и максимального падения напряжения на якорной цепи. Для четных вариантов в качестве силового преобразователя принять 14-разрядный (без учета знака) цифровой транзисторный широтно-импульсный преобразователь с максимальным выходным напряжением, определяемым аналогично, как и для тиристорного преобразователя. Влияние силового преобразователя на передаточную функцию электродвигателя учесть увеличением на 40% активного сопротивления якорной цепи и 20% увеличением индуктивности.
3. Произвести расчет регуляторов непрерывного прототипа позиционно-следящего электропривода. При этом для нечетных вариантов принять, что для сопряжения цифровой части с аналоговой служит 14-разрядный цифро-аналоговый преобразователь.
4. Найти дискретные передаточные функции: непрерывной части системы с учетом экстраполятора нулевого порядка, цифрового управляющего устройства и замкнутого электропривода в целом.
5. Построить частотные характеристики разомкнутой и замкнутой системы рассматриваемого электропривода, как с учетом, так и без учета процесса квантования по времени, оценить полосу частот пропускания контура положения.
6. Построить графики переходных процессов в электроприводе по отношению к управляющему и возмущающему воздействиям. Под последним понимается изменение момента нагрузки на электропривод. Построение производить для двух случаев: для непрерывного прототипа электропривода и с учетом квантования по времени в цифровой части. Оценить влияние процесса квантования по времени на показатели качества регулирования.
7. Рассчитать параметры корректирующего устройства по управляющему воздействию для компенсации динамических ошибок слежения.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.