Мmax=130 Нм;
Iн=28 А;
nн=1000 об/мин;
nmax=2000 об/мин;
Uн=62 В;
Jн=0,034 кгм2;
Тя=0,00675 с;
Тм=0,0168 с;
Lя=0,00073 Гн.
Проверим двигатель на перегрузочную способность. При этом должно выполняться соотношение:
![]() , где
, где ![]() кгм2.
кгм2.
130 ³ 14,47+0,046·1000
130 Нм ³ 60,47Нм
Вывод: Выбранный двигатель подходит для решения поставленной технической задачи.
Передаточная функция двигателя по управляющему воздействию:
![]() , где
, где
![]() ;
;
![]() ;
;
![]() Нм/А;
Нм/А;
![]() Вс/рад.
Вс/рад.
Значит ![]() рад/Вс,
рад/Вс,
![]()
Передаточная функция исполнительного механизма:
![]()
![]() мкм/рад.
мкм/рад.
Передаточная функция тиристорного силового преобразователя представляет собой апериодическое звено
![]() , где
, где ![]() -
коэффициент передачи, а
-
коэффициент передачи, а ![]() -
постоянная времени силового преобразователя.
-
постоянная времени силового преобразователя.
![]()
Значит передаточная функция транзисторного силового преобразователя:
![]()
Структурная схема следящего электропривода, построенного по принципу СПР, приведена на рис. 3.
Здесь ![]() -
сигнал задания на входе следящего электропривода,
-
сигнал задания на входе следящего электропривода, ![]() –
выходная координата исполнительного механизма.
–
выходная координата исполнительного механизма.
Исполнительный механизм, подключённый к валу электродвигателя, представлен передаточной функцией:
![]() .
.
Силовой преобразователь представлен передаточной функцией
![]() ,
,
Электродвигатель постоянного тока изображен в виде комбинаций трёх динамических звеньев:
1) передаточной функции якорной
цепи, связывающей ток ![]() якоря
электродвигателя с напряжением
якоря
электродвигателя с напряжением ![]() на
якоре.
на
якоре.
![]() , где
, где ![]() -
сопротивление,
-
сопротивление, ![]() -
постоянная времени,
-
постоянная времени, ![]() -
индуктивность якорной цепи;
-
индуктивность якорной цепи;
![]()
2) передаточной функцией электромеханического звена, связывающей скорость ω вращения вала электродвигателя с его динамическим током I
![]() , где
, где ![]() -
электромеханическая постоянная времени,
-
электромеханическая постоянная времени,
![]()
3) пропорционального звена с коэффициентом передачи ![]() ,
связывающего э.д.с. Е с угловой скоростью ω вала двигателя.
,
связывающего э.д.с. Е с угловой скоростью ω вала двигателя.
Датчик обратной связи по скорости
представлен безинерционным звеном с коэффициентом передачи ![]() .
.
В данной системе контур тока настроен на технический оптимум, контур скорости – на симметричный оптимум, а для снижения перерегулирования в контуре скорости не его входе поставлен апериодический фильтр.
Передаточная функция регулятора тока
 , где
, где![]() - коэффициент передачи обратной связи по току.
- коэффициент передачи обратной связи по току.
![]() В/А.
В/А.
 ,
,
Передаточная функция регулятора скорости
 , где
, где ![]() Вс/рад.
Вс/рад.
 .
.
Передаточная функция апериодического фильтра
![]() ;
;
![]() .
.
Как правило, в прецизионных следящих электроприводах
контур положения реализуется на микропроцессорных контроллерах или устройствах
ЧПУ, датчик положения с коэффициентом передачи ![]() имеет
цифровой выходной сигнал, а для связи цифровой части с аналоговым комплектным
электроприводом используется цифро–аналоговый преобразователь (ЦАП) с коэффициентом
передачи
имеет
цифровой выходной сигнал, а для связи цифровой части с аналоговым комплектным
электроприводом используется цифро–аналоговый преобразователь (ЦАП) с коэффициентом
передачи ![]() .
.
Контур положения настроен на технический оптимум. Передаточная функция регулятора положения, обеспечивающего технический оптимум в контуре.
![]() ;
;
![]() .
.
Таким образом, для настройки контура положения на технический оптимум необходим пропорциональный регулятор.
Структурная схема цифро - аналоговой следящего СПР положения с учетом процесса квантования сигналов по времени приведена на рис. 5. В цифро-аналоговой СПР ЦАП выполняет функцию экстраполятора нулевого порядка
При переходе к z-преобразованиям структурная схема СПР с учетом дискретных передаточных функций принимает вид, приведенный на рис. 10
|
|
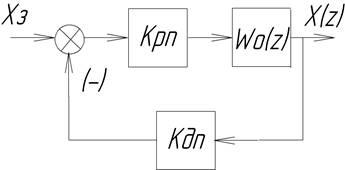
Рис. 10. Структурная схема СПР при переходе к дискретным
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.