Міністерство освіти і науки, молоді та спорту України
Луцький національний технічний університет
Кафедра комп’ютерних технологій професійного навчання
Курсовий проект
з курсу:
«Основи теорії автоматизованого управління»
Виконав: ст.гр.ПНК-41
Перевірив: доцент
Луцьк 2011
Вступ
Теорія автоматичного управління (ТАУ) з'явилася в другій половині XIX століття. З самого початку зародження дана теорія існувала як теорія регулювання. Широке застосування парових машин викликало потребу в регуляторах, тобто в спеціальних пристроях, що підтримують стійкий режим роботи парової машини. Це дало початок науковим дослідженням в області управління технічними об'єктами. Виявилось, що результати і висновки даної теорії можуть бути застосовні до управління об'єктами різної природи з різними принципами дії. В даний час сфера її впливу розширилася на аналіз динаміки таких систем, як економічні, соціальні і т.п. Тому колишня назва “Теорія автоматичного регулювання” замінена на ширше - “Теорія автоматичного управління”.
Основні переваги автоматизації полягають у можливостях забезпечити:
- зростання продуктивності та поліпшення умов праці;
- виконання робіт у важкодоступних чи взагалі недоступних для людини сферах (радіоактивні зони, космос, окремі види металургійного та гірничого виробництва);
- підвищення точності, якості технологічних процесів і відповідних виробів;
- зростання надійності та техніко-економічних показників і загальної культури виробництва та кваліфікації обслуговуючого персоналу.
Метою написання даної курсової роботи є вивчення принципів автоматичного управління, типів систем автоматичного управління, що використовуються в техніці.
Предметом даної роботи є структурна схема системи автоматичного регулювання.
Об’єкт дослідження: властивості та поведінка як окремо взятих ланок так і системи в цілому.
Управління яким-небудь об'єктом (об'єкт управління позначатимемо ОУ) є
дією на нього в цілях досягнення необхідних станів або процесів. Як ОУ може служити літак, верстат, електродвигун і т.п. Управління об'єктом за допомогою технічних засобів без участі людини називається автоматичним управлінням. Сукупність ОУ і засобів автоматичного управління називається системою автоматичного управління (САУ).
Основним завданням автоматичного управління є підтримка певного закону зміни однієї або декількох фізичних величин, що характеризують процеси, що протікають в ОУ, без безпосередньої участі людини. Ці величини називаються керованими величинами. Якщо як ОУ розглядається хлібопекарська піч, то керованою величиною буде температура, яка повинна змінюватися за заданою програмою відповідно до вимог технологічного процесу.
РОЗДІЛ 1 АНАЛІЗ СИСТЕМИ АВТОМАТИЧНОГО КЕРУВАННЯ
1.1 Аналіз ланок системи і системи в цілому
![]() Задана структурна схема автоматичного керування (САК) у вигляді
графічного зображення математичної моделі системи з’єднаних ланок (рис.1).
Задана структурна схема автоматичного керування (САК) у вигляді
графічного зображення математичної моделі системи з’єднаних ланок (рис.1). 
Рис.1.1 Структурна схема системи автоматичного керування
Таблиця 1. Вихідні дані для розрахунку
|
k1 |
|
|
k2 |
220 с-1 |
|
k3 |
1,2 с-1 |
|
k4 |
0,92 с-1 |
|
k5 |
6,0 с-1 |
|
Т3 |
1,2 с |
|
Т4 |
0,7 с |
|
Т5 |
0,53 с |
Кожна ланка зображена прямокутником, у якому відображені, у вигляді передаточних функцій, її динамічні властивості.
Дана система складається з 6 послідовно розміщених ланок:
![]() -
безінерційні ланки;
-
безінерційні ланки;
![]() і
і
![]() -
аперіодичні ланки першого порядку;
-
аперіодичні ланки першого порядку;
![]() -
диференціююча ланка.
-
диференціююча ланка.
Дана система є замкнутою, містить від’ємний зворотній зв’язок.
Передаточна функція замкнутої системи, у випадку, коли розглядається головний зворотній зв’язок системи автоматичного регулювання, дорівнює:
![]()
де, ![]() -
передаточна функція прямого каналу (розімкнутої системи).
-
передаточна функція прямого каналу (розімкнутої системи).
Враховуючи дію збурення F(p) на об’єкт регулювання, передаточна функція системи по збуренню дорівнює:

Отже, дана система є одноконтурною замкнутою системою, при розмиканні якої в довільній точці можна дістати ланцюжок ланок, в якому відсутні паралельно з’єднані ланки і ланки, охоплені зворотнім зв’язком.
1.2 Визначення передаточних функцій системи
1. Знаходимо передаточну функцію для послідовного з’єднання.
При послідовному з’єднанні ланок вихідна величина кожної попередньої ланки подається на вхід наступної ланки, і тому рівняння динаміки групи послідовно з’єднаних ланок повинно дати залежність вихідної останньої ланки до вхідної величина вхідної величини першої ланки.

2. Знаходимо передаточну функцію із зворотного зв’язку.
Зворотний зв’язок – це таке виконання зв’язків у системі, при якому на вхід елементу надходить величина пропорційна вихідній величині елементу.
3. Знаходимо передаточну функцію по збуренню:
Для запису характеристичного рівняння прирівняємо знаменник передаточної функції замкнутої системи до нуля:
![]() =0.
=0.
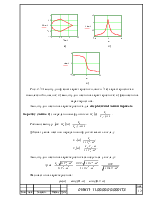
РОЗДІЛ 2 ПОБУДОВА АМПЛІТУДНО-ЧАСТОТНИХ І ФАЗОВИХ ХАРАКТЕРИСТИК СИСТЕМИ
2.1 Побудова амплітудно-частотних і фазово-частотних характеристик ланок системи
Для знаходження амплітудно-частотних та фазово-частотних
характеристик ланок системи будемо проводити заміну![]() в передаточну функцію ,
в передаточну функцію ,
і тоді вона набуватиме вигляду:
![]() , де U(w) – дійсна частина,
, де U(w) – дійсна частина,
V(w) – уявна частина.
Амплітудно-частотна характеристика знаходиться за формулою:
![]() .
.
Відповідно фазочастотна характеристика знаходиться:
![]() .
.
Для побудови амплітудно-фазової характеристики в
передаточну функцію відповідної ланки роблять підстановку ![]() ,
причому
,
причому ![]() ,
, ![]() -частота.
-частота.
Передаточна функція безінерційної ланки 1:
![]()
![]()
Дійсна і уявна частини передаточної функції мають вигляд:
![]()
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.