![]()
![]()
![]() A(t)
A(t)
![]()
![]()
![]() а) B(t)
а) B(t)
![]()






![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() y(t) I - K(t)
+ + I/s
y(t) I - K(t)
+ + I/s ![]()


![]()
![]() б) А(t)
б) А(t)
![]()
![]() C(t)
C(t)
Рис.4.4. Структурные схемы непрерывного объекта (а) и фильтра Калмана (б).
При модальном управлении вектор состояния можно оценивать при помощи фильтра Калмана. Вся замкнутая система управления в целом описывается тогда уравнениями:
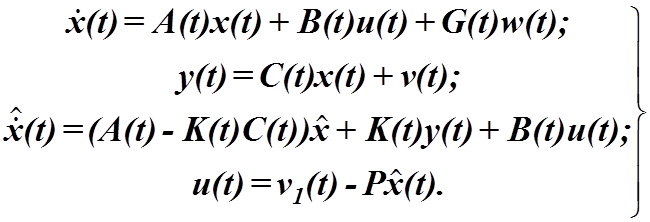 (4.41)
(4.41)
Под ![]() понимается вектор
задающих воздействий, а под Р- матрица преобразования регулятора.
понимается вектор
задающих воздействий, а под Р- матрица преобразования регулятора.
Внешнее случайное воздействии и измерительный шум не оказывают влияния на устойчивость системы и при дальнейших преобразованиях они опущены.
Докажем теперь, что корни замкнутой системы совпадают
с собственными значениями матриц ![]() и
и ![]() Введем вместо переменной
Введем вместо переменной ![]() переменную
переменную ![]() и
после преобразований получим следующую систему уравнений:
и
после преобразований получим следующую систему уравнений:
 (4.42)
(4.42)
Система уравнений (4.41) имеет треугольную матрицу
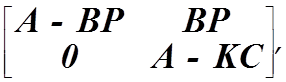
откуда следует, что характеристический полином этой системы
![]()
имеет корни, совпадающие с собственными числами указанных матриц. В последних
выражениях, с целью упрощения записи, параметр t опущен.
Полученный результат показывает, что если дело идет о смещении корней замкнутой системы к предписанным значениям, то наблюдающее устройство никак не нарушает этого процесса, а просто добавляет к имеющимся корням системы свои корни. Структурная схема всей системы управления, составленная по уравнениям (4.41) показана на рис.4.5.
Сделаем в системе (4.41) эквивалентные преобразования.
В третье уравнение системы вместо ![]() подставим его
значение
подставим его
значение ![]() и в результате получим
и в результате получим

или

Преобразованная структурная схема системы, построенная
по последнему выражению (рис.4.6) показывает, что фильтр Калмана представляет
собой не что иное, как модель наблюдаемого объекта, дополненную звеном ![]() Основная трудность в создании этого
фильтра заключается именно в определении коэффициента
Основная трудность в создании этого
фильтра заключается именно в определении коэффициента ![]()
![]()
![]()
![]()
![]() Объект
V
Объект
V ![]()
![]()
![]()


![]()
![]()
![]()
![]()
![]()
![]()


![]()
![]()
![]() G(t) A(t)
G(t) A(t)
W
 |

![]()
![]()
![]() K(t)
K(t)

![]()
![]()

![]()
![]()
![]()
![]()
![]()
![]() B(t)
+ + I/s
B(t)
+ + I/s ![]()
![]()
![]() Фильтр Калмана A(t)-K(t)C(t)
Фильтр Калмана A(t)-K(t)C(t)
 u
u
![]()
![]() -P(t)
-P(t)
Рис.4.5. Замкнутая система c наблюдающим устройством Калмана
Когда,
действующие на объект случайные возмущения и ошибки измерения- белые шумы,
коэффициент ![]() можно расчитать по ранее выведенным
уравнениям. Если действующие на объект возмущения w1 (t) представляются
“цветным шумом”, а ошибки измерения -“ белым шумом”, то по сравнению с
предыдущим случаем дополнительных трудностей не возникает. Необходимо просто к
уравнениям объекта добавить уравнение формирующего фильтра, предназначенного
для получения “ цветного шума” из белого.
можно расчитать по ранее выведенным
уравнениям. Если действующие на объект возмущения w1 (t) представляются
“цветным шумом”, а ошибки измерения -“ белым шумом”, то по сравнению с
предыдущим случаем дополнительных трудностей не возникает. Необходимо просто к
уравнениям объекта добавить уравнение формирующего фильтра, предназначенного
для получения “ цветного шума” из белого.
Исходный объект и формирующий фильтр образуют расширенный объект управления. Выходной сигнал формирующего фильтра с требуемой кривой спектральной плотности входного сигнала рассматривается как часть переменных состояния расширенного объекта. Таким образом, благодаря формирующему фильтру, задача сводится к прежнему случаю, когда возмущающие воздействия представляют собой “ белый шум”.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() B(t) +
+ I/s C(t) + +
B(t) +
+ I/s C(t) + +


![]() - 1
- 1
![]()
![]()
![]() W Объект
W Объект

![]()
![]()
![]() K(t)
K(t)
![]()
![]()
![]()
![]()
![]()
![]()

![]()
![]()
![]()
![]()
![]()
![]() B(t) + + I/s
B(t) + + I/s
![]() C(t)
C(t) ![]()
![]()
![]()
 Фильтр Калмана
Фильтр Калмана
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() A(t) -P(t) u
A(t) -P(t) u
![]()
![]()
Рис.4.6.Система, эквивалентная, изображенной на рис.4.5.
Статистическая обработка информации, основанная на теории оптимальной фильтрации Калмана-Бьюси, предполагает техническую реализацию на базе цифровых ЭВМ. Следовательно, особый интерес в прикладных задачах имеет дискретная оптимальная фильтрация. Результаты непрерывной оптимальной фильтрации Калмана-Бьюси могут быть распространены на дискретные динамические системы [2,3]. Приведем без вывода уравнения дискретного оптимального фильтра Калмана-Бьюси.
Математическая модель обьекта:

Математическая модель измерений:
Уравнения фильтра:


Оптимальный коэффициент усиления:

Априорная корреляционная матрица ошибок оценивания:

Апостериорная корреляционная матрица ошибок оценивания:

В приведенных уравнениях :
![]() n-мерный
вектор состояния;
n-мерный
вектор состояния;
 переходная
матрица состояния размерности
переходная
матрица состояния размерности ![]() ;
;
 матрица
входного воздействия.
матрица
входного воздействия.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.