Для увеличения быстродействия системы скомпенсируем пропорционально-дифференцирующим звеном самую медленную составляющую системы. Самой медленной составляющей системы является исполнительный механизм. Его постоянная времени Т = 0.05 с. Пропорционально-дифференцирующее звено следует установить последовательно с исполнительным механизмом с целью компенсации его постоянной времени и перед ним так, чтобы пропорционально-дифференцирующее звено вошло в низковольтную часть системы. (В качестве пропорционально-дифференцирующего звена ставим блок из параллельно соединённых пропорционального и реального дифференцирующего звеньев. Постоянную времени реального дифференцирующего звена примем в 10 раз меньше постоянной времени исполнительного механизма Т = 0.005 с.)
Структурно-алгоритмическая схема САУ принимает вид:
 |
|||
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
 |
Рассчитаем параметры введённых звеньев:
Wп – пропорциональное звено
Wд – реальное дифференцирующее звено

Из этого выражения видно, что для компенсации Тим и увеличения быстродействия необходимо, чтобы КД/Кп = Тим. Пусть Кп =1, а тогда Кд = 0.05. Примем Тд = 0.005 с.
Смоделируем данную схему (Кd = 0.1 и Кр = 35):
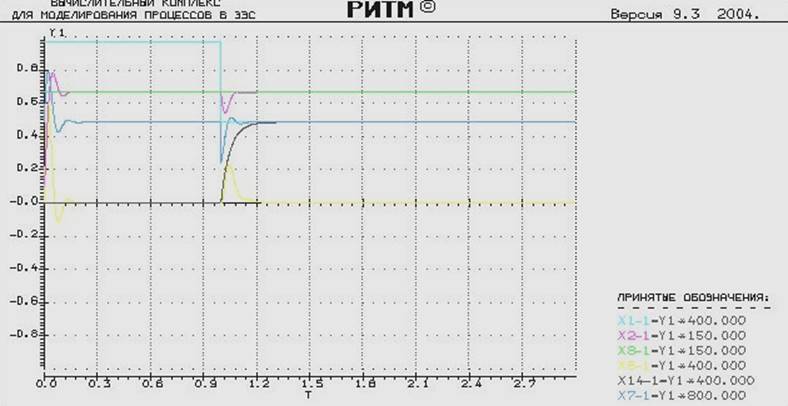
Х1 – сигнал на выходе основного источника
Х2 – сигнал на выходе нагрузки (регулируемая величина)
Х6 – сигнал на выходе исполнительного механизма системы регулирования
Х8 – сигнал на выходе уставки
Х14 – сигнал на выходе исполнительного механизма системы компенсационного управления
Х7 – сигнал на входе нагрузки (напряжение на нагрузке).
По результатам опыта:
1). Статизм равен нулю (теоретически и из опыта)
2). Перерегулирование находится в пределах допустимых значений:
![]()
Теоретически:
|
|
![]()
![]()
3). Длительность переходного процесса 0.15 сек. по осциллограмме и теоретически:
![]()
Таким образом нам удалось повысить быстродействие системы в два раза
4). Суммарное напряжение, подаваемое на нагрузку, не превышает двукратного значения ЭДС основного источника. Емакс = 631 В < 778 В
15. Выводы и анализ результатов
В данной работе была спроектирована и исследована система электропитания с регулируемым источником. Для этого на первом этапе работы были подробно исследованы параметры нагрузки, по ним были рассчитаны параметры основного источника электропитания, а затем в соответствии с заданными параметрами цепи регулирования и технологическими требованиями разработана цепь регулирования источника электропитания.
На втором этапе работы проводилась поэтапная оптимизация системы автоматического управления. По результатам предварительных расчётов были построены области устойчивости в плоскости переменных параметров. В области устойчивости подтверждена полная работоспособность САУ, но для достижения необходимых технологических параметров потребовалась оптимизация системы. Введение компенсационного управления позволило добиться нулевого статизма, не зависящего от значения переменных параметров, которые были оптимизированы таким образом, что величина перерегулирования также вошла в допустимый интервал. Скомпенсировав самую медленную составляющую системы, увеличили быстродействие всей САУ.
Таким образом, разработанная система является полностью работоспособной, удовлетворяет поставленным технологическим требованиям, а также обладает рядом преимуществ: при нормальной работе основного источника в установившемся режиме цепь регулирования не задействована, что минимизирует потери; цепь регулирования спроектирована низковольтной, что повышает удобство и безопасность системы в эксплуатации; вследствие нулевого статизма гарантируется бесперебойное энергоснабжение нагрузки даже при аварии на основном источнике электропитания; перерегулирование и скачки напряжения на нагрузке минимизированы, что положительно влияет на износоустойчивость элементов системы; также система обладает высоким быстродействием, что позволяет оперативно реагировать на изменения в сети.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.