|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
7. Экспериментальная АФЧХ
Подготовить имитационную модель и провести серию расчётов, позволяющую построить экспериментальную амплитудно-фазочастотную характеристику звена, эквивалентирующего нагрузку.
Схема имитационной модели:
 |
||||||
|
|
|||||
1) BLT 091 – генератор гармонического сигнала
2) BLT 133 – инерционное звено первого порядка
3) BLT 014 – осциллограф
4) BLT 015 – табулятор
Расчёт параметров серии экспериментов для построения экспериментальной АФЧХ
|
Расчётные данные |
Опытные данные |
||||||
|
ω, рад/с |
f, Гц |
T, с |
Ток. |
h |
Тга |
Xm |
φ |
|
5 |
0,795775 |
1,256637 |
8,796460 |
0,006283 |
6,283186 |
0,254561 |
-0,142521 |
|
13 |
2,069014 |
0,483322 |
3,383254 |
0,002417 |
2,416610 |
0,240943 |
-0,357116 |
|
18 |
2,864789 |
0,349066 |
2,443461 |
0,001745 |
1,745329 |
0,228482 |
-0,476836 |
|
30 |
4,774648 |
0,209440 |
1,466077 |
0,001047 |
1,047198 |
0,194884 |
-0,710851 |
|
45 |
7,161972 |
0,139626 |
0,977384 |
0,000698 |
0,698132 |
0,157448 |
-0,911904 |
|
70 |
11,140845 |
0,089760 |
0,628319 |
0,000449 |
0,448799 |
0,114596 |
-1,108940 |
|
180 |
28,647887 |
0,034907 |
0,244346 |
0,000175 |
0,174533 |
0,048874 |
-1,378970 |
Пример расчёта (2-я строка):
f = ω/2π = 13 рад/с /2π = 2,069014 Гц
Т = 1/f = 1/2,069014 Гц = 0,483322 с
Ток. = 7Т = 7*0,483322 с = 3,383254 с
h = Т/200 = 0,483322 с / 200 = 0,002417 с
Тга = 5Т = 5*0,483322 с = 2,416610 с
Tок – время окончания расчета,
Тга – время гармонического анализа,
h – шаг расчета.
Осциллограмма входного и выходного сигнала при частоте ω = 45 рад/с
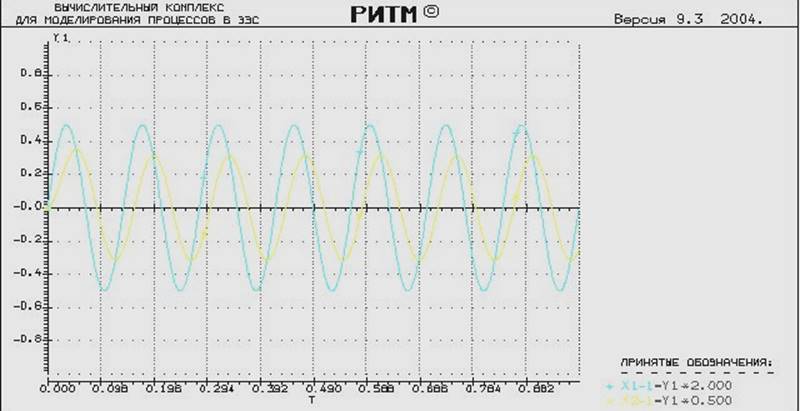
Здесь:
Х1 – входной сигнал (ЭДС)
Х2 – выходной сигнал (регулируемая величина)
Полученная экспериментально АФЧХ совпадает с аналитической:
|
|
|
|
|
|
|
|
|
|
8. Структурно-алгоритмическая схема САУ
Составить структурно-алгоритмическую схему системы автоматического управления
 |
|||||||
 |
|||||||
|
|||||||
![]()
![]()
![]()
![]()
![]()
![]()
![]()
 |
После преобразования:
 |
где: ![]()
![]()
Полученное значение передаточной функции эквивалентированной структурно – алгоритмической схемы САУ имеет вид:
а). относительно источника ЭДС Е0:
![]()
б). относительно сигнала уставки: ![]()
9. Построение области устойчивости системы в плоскости коэффициентов Кр и Кд
Построить область устойчивости системы в плоскости коэффициентов Кр и Кд, где
Кр —коэффициент передачи звена, эквивалентирующего регулятор
Кд — коэффициент передачи звена, эквивалентирующего датчик текущего значения регулируемой переменной
Полученное значение передаточной функции эквивалентированной структурно – алгоритмической схемы САУ:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.