Х1 – сигнал на выходе основного источника
Х2 – сигнал на выходе нагрузки (регулируемая величина)
Х6 – сигнал на выходе исполнительного механизма
Х8 – сигнал на выходе уставки
Данные результаты нас не устраивают, так как ЭДС регулируемого источника в установившемся режиме не равна нулю, а регулируемая величина не равна уставке. Следовательно, структурно-алгоритмическая схема нашей системы нуждается в корректировке.
11. Корректировка и расчёт основных параметров системы
Выбрать значения коэффициентов Кри Кд из области устойчивости, которые в статическом режиме обеспечивают нулевую величину ЭДС Ер регулируемого источника. По результатам эксперимента рассчитать статизм и для выбранных значений коэффициентов Кри Кд. Рассчитать теоретические значения указанных показателей.
Причиной некорректной работы системы, проиллюстрированной в п. 10, является несогласованность схемы сравнения регулируемой величины с уставкой: датчик ослабляет в 10 раз (Кd = 0.1) сигнал с выхода нагрузки, а уставка выдаёт сигнал той величины, которой должен быть сигнал на выходе нагрузки. В результате на исполнительный механизм поступает ложный сигнал рассогласования и система работает неправильно. Это можно исправить введением после уставки пропорционального звена, коэффициент передачи которого будет равен коэффициенту передачи датчика:
|
|||||||||
 |
|||||||||
 |
|||||||||
|
|||||||||
![]()
![]()
![]()
![]()
![]()
![]()
![]()
 |
Промоделируем процесс в скорректированной системе с теми же величинами Кd = 0.1 и
Кр = 10:

Х1 – сигнал на выходе основного источника
Х2 – сигнал на выходе нагрузки (регулируемая величина)
Х6 – сигнал на выходе исполнительного механизма
Х8 – сигнал на выходе уставки
Как видно по результатам проведённого опыта, мы смогли добиться нулевой ЭДС регулируемого источника и равенства регулируемой величины уставке в установившемся режиме.
Рассчитаем теоретические значения параметров системы:
1). Статизм
![]()
2). Перерегулирование
a0 = 287; a1 = 27.22*103; a2 = 82.96*104; a3 = 4.1152*106 Кр Кд+8*106
|
|
|
|
|
|
![]()
3). Длительность переходного процесса
![]()
Экспериментальные статизм, перерегулирование и длительность переходного процесса можно найти из опыта п. 12, в котором имитируется потеря 50 % ЭДС, т. е. изменение воздействия, что и требуется для опытного вычисления статизма.
12. Моделирование аварийного режима работы САУ
Подготовить имитационную модель, позволяющую за один расчет выполнить:
— моделирование процесса включения системы питания с получением установившегося режима;
— моделирование последующего переходного процесса, обусловленного потерей 50% величины э.д.с. Е0с получением нового установившегося режима.
Воспользуемся имитационной моделью, приведённой в п. 10 с учётом внесённой в п. 11 корректировки. Значения коэффициентов Кр и Кd прежние (Кd = 0.1 и Кр = 10).Для имитации аварийного режима зададим потерю 50 % величины ЭДС основного источника в момент времени t = 1 с:
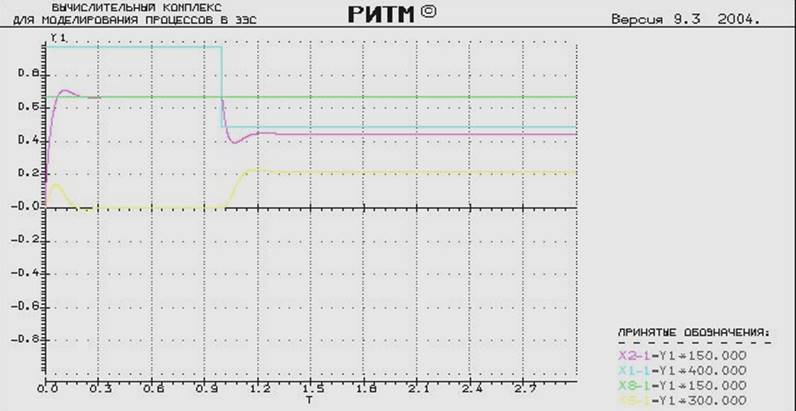
Х1 – сигнал на выходе основного источника
Х2 – сигнал на выходе нагрузки (регулируемая величина)
Х6 – сигнал на выходе исполнительного механизма
Х8 – сигнал на выходе уставки
Опытные характеристики:
1). Статизм
![]()
2). Перерегулирование
![]()
3). Длительность переходного процесса – 0.3 сек.
Отличие теоретических и опытных параметров составило не более 18 % (перерегулирование), менее 0.01 % (статизм) и не более 10 % (длительность переходного процесса).
13. Оптимизация САУ
Провести поэтапную оптимизацию коэффициентов Кри Кд с целью обеспечения допустимых значений показателей качества.
Технологические требования:
1). Статизм – не более 5 %
2). Перерегулирование – не более 30 %
3). Цепи регулирования системы должны быть низковольтными
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.