














СОДЕРЖАНИЕ
Введение 3
1 Анализ линейной системы 4
1.1 Описание принципиальной схемы системы 4
1.2 Составление функциональной схемы системы 5
1.3 Построение структурной схемы системы 6
1.4 Преобразование структурной схемы системы 7
1.5 Определение устойчивости системы по критерию Гурвица 9
1.6 Определение устойчивости системы по критерию Михайлова 10
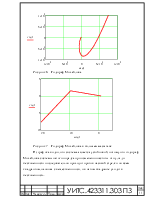
1.7 Построение переходного процесса системы 11
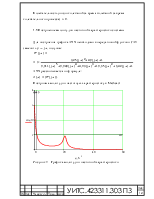
1.8 Построение амплитудно-частотной характеристики системы 13
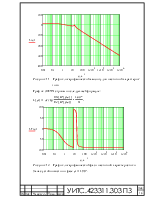
1.9 Построение логарифмической амплитудно-частотной характе-
ристики и логарифмической фазо-частотной характеристики 14
2.Анализ нелинейной системы 17
2.1 Фазовый портрет системы 17
Заключение 21
Список использованных источников 22
ВВЕДЕНИЕ
Автоматическое регулирование представляет собой наиболее эффективный принцип автоматики при частичной автоматизации, когда технические средства автоматики осуществляют лишь простые функции управления, связанные с измерением, анализом, контролем различных физических величин и отработкой решений, принятых оператором в виде установок, программ или других сигналов управления.
Современные системы управления сложными объектами промышленной технологии строятся по иерархическому принципу. Это значит, что система управления такими объектами расчленяется на ряд систем, стоящих на разных уровнях подчинения. Система более высокого ранга, ориентируясь на общий (глобальный) критерий управления, выдает команды на включение или отключение отдельных локальных объектов, а также осуществляет выбор частных критериев управления этими объектами. Локальные системы управления осуществляют поддержание заданных оптимальных режимов как в пусковых, так и в нормальных эксплуатационных условиях. Являясь нижним иерархическим уровнем автоматических систем управления промышленными объектами локальные системы осуществляют функции измерения, контроля и регулирования основных технологических параметров, характеризующих состояние технологического процесса. Количество регулируемых параметров в отдельно взятой локальной системе управления невелико и составляет один или два параметра. Из общего числа систем управления современным производством локальные системы составляют около 80%. Качество работы локальных систем управления во многом определяет стабильность и качество выходного продукта, а, следовательно, и рентабельность производства.
1 АНАЛИЗ ЛИНЕЙНОЙ СИСТЕМЫ
1.1 Описание принципиальной схемы системы
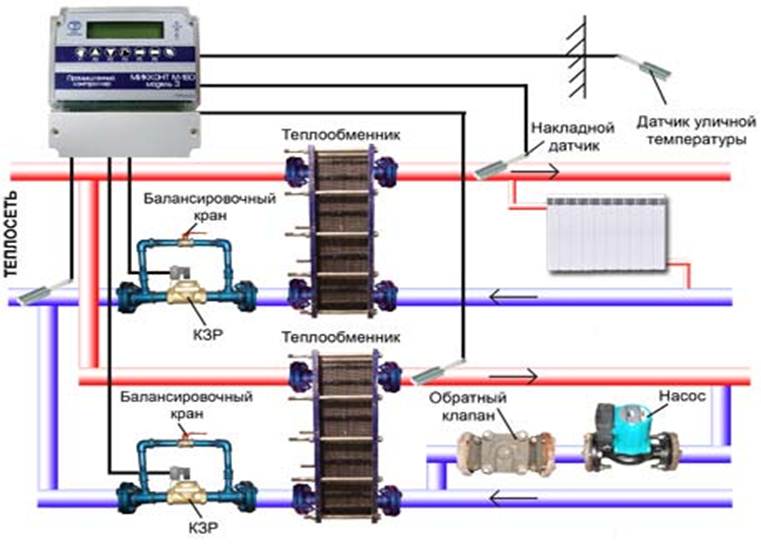
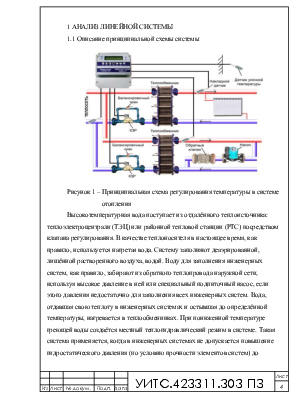
Рисунок 1 – Принципиальная схема регулирования температуры в системе
отопления
Высокотемпературная вода поступает из отдалённого теплоисточника: теплоэлектроцентрали (ТЭЦ) или районной тепловой станции (РТС) посредством клапана регулирования. В качестве теплоносителя в настоящее время, как правило, используется нагретая вода. Систему заполняют деаэрированной, лишённой растворенного воздуха, водой. Воду для заполнения инженерных систем, как правило, забирают из обратного теплопровода наружной сети, используя высокое давление в ней или специальный подпиточный насос, если этого давления недостаточно для заполнения всех инженерных систем. Вода, отдавшая свою теплоту в инженерных системах и остывшая до определённой температуры, нагревается в теплообменниках. При пониженной температуре греющей воды создаётся местный теплогидравлический режим в системе. Такая система применяется, когда в инженерных системах не допускается повышение гидростатического давления (по условию прочности элементов систем) до давления, под которым находится вода в наружном теплопроводе. Преимуществом этой схемы, кроме обеспечения устойчивого теплогидравлического режима, индивидуального для каждого здания, является её высокая надёжность, в частности, возможность сохранения циркуляции с использованием теплосодержания воды в течение некоторого времени, обычно достаточного для устранения возможного аварийного повреждения наружных теплопроводов.
1.2 Составление функциональной схемы системы
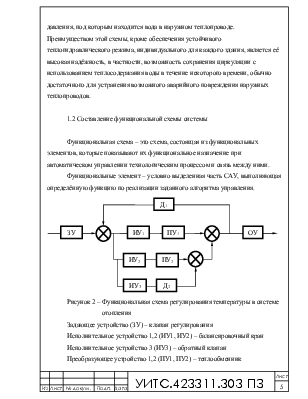
Функциональная схема – это схема, состоящая из функциональных элементов, которые показывают их функциональное назначение при автоматическом управлении технологическим процессом и связь между ними.
Функциональные элемент – условно выделенная часть САУ, выполняющая определённую функцию по реализации заданного алгоритма управления.
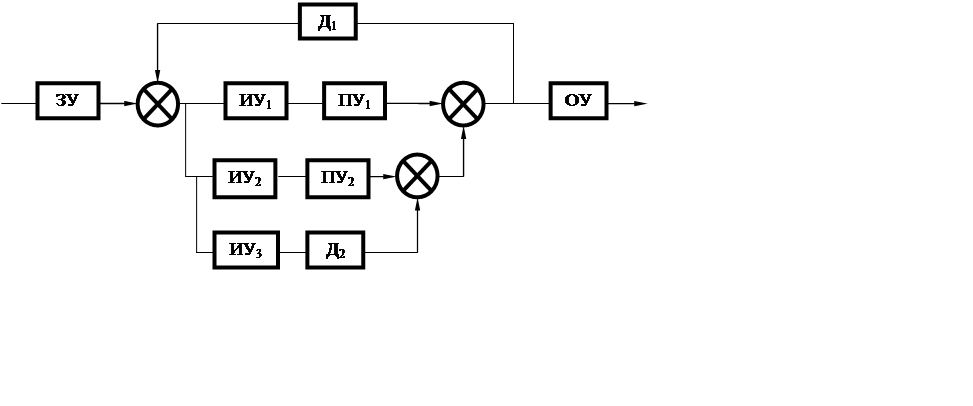 |
Рисунок 2 – Функциональная схема регулирования температуры в системе
отопления
Задающее устройство (ЗУ) – клапан регулирования
Исполнительное устройство 1,2 (ИУ1, ИУ2) – балансировочный кран
Исполнительное устройство 3 (ИУ3) – обратный клапан
Преобразующее устройство 1,2 (ПУ1, ПУ2) – теплообменник
Датчик 1 (Д1) – счётчик
Датчик 2 (Д2) – насос
Объект управления (ОУ) – батарея
1.3 Построение структурной схемы системы
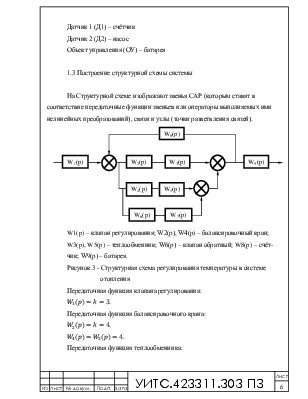
На Структурной схеме изображают звенья САР (которым ставят в соответствие передаточные функции звеньев или операторы выполняемых ими нелинейных преобразований), связи и узлы (точки разветвления связей).
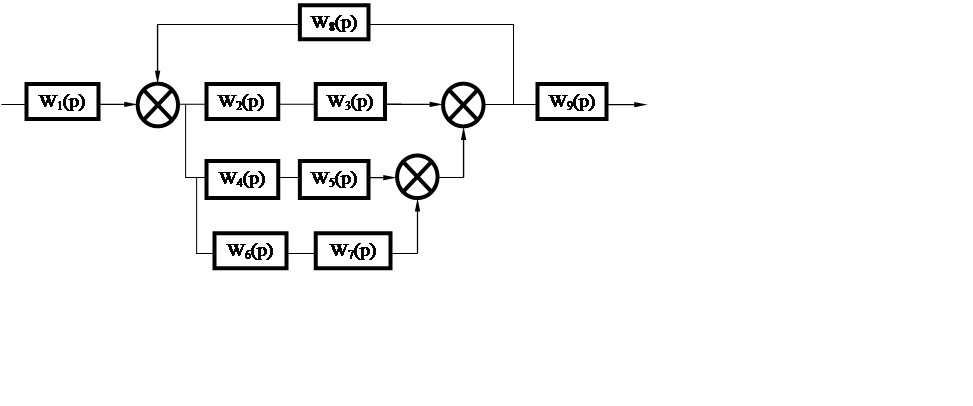 |
W1(p) – клапан регулирования; W2(p), W4(p) – балансировочный кран;
W3(p), W5(p) – теплообменник; W6(p) – клапан обратный; W8(p) – счёт-
чик; W9(p) – батарея.
Рисунок 3 - Структурная схема регулирования температуры в системе
отопления
Передаточная функция клапана регулирования:
![]() .
.
Передаточная функция балансировочного крана:
![]() ,
,
![]() .
.
Передаточная функция теплообменника:
![]()
 ,
,
 .
.
Передаточная функция обратного клапана:
![]() .
.
Передаточная функция насоса:
![]()
 .
.
Передаточная функция счётчика:
![]() .
.
Передаточная функция батареи:
![]()
 .
.
1.4 Преобразование структурной схемы системы
Звенья W6(p) и W7(p) соединены последовательно, следовательно
![]() ,
,
![]()
 .
.
Звенья W4(p) и W5(p) соединены последовательно, следовательно
![]() ,
,
![]()
 .
.
Звенья W10(p) и W11(p) соединены параллельно, следовательно
![]() ,
,
![]()
 .
.
Звенья W2(p) и W3(p) соединены последовательно, следовательно
![]() ,
,
![]() .
.
Звенья W12(p) и W13(p) соединены параллельно, следовательно
![]() ,
,
![]()
 .
.
 В соответствии с
данными преобразованиями, структурная схема системы примет вид:
В соответствии с
данными преобразованиями, структурная схема системы примет вид:
Рисунок 4 – Вид структурной схемы системы
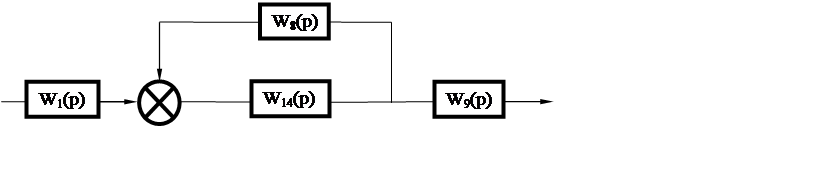
Звенья W14(p) и W8(p) соединены встречно-параллельно, следовательно
![]()
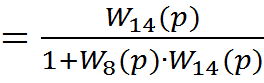 ,
,
![]()
 .
.
Звенья W1(p), W15(p) и W9(p) соединены последовательно, следовательно
![]() ,
,
![]()

 Получим:
Получим:
Рисунок 5 – Структурная схема системы после преобразования
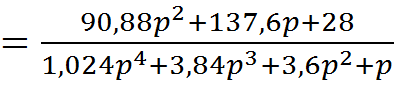
Общая передаточная функция системы:
 .
.
Упростим функцию, поделив каждый коэффициент на 140, тогда общая передаточная функция примет вид:
![]()
 .
.
1.5 Определение устойчивости системы по критерию Гурвица
Передаточная функция САУ имеет вид:
![]() .
.
Знаменатель передаточной функции есть характеристическое уравнение:
![]() .
.
Для устойчивости системы необходимо и достаточно, чтобы все диагональные миноры главного определителя, составленного по коэффициентам характеристического уравнения, были больше нуля.
Коэффициенты характеристического уравнения:
![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
; ![]() .
.
Составим определитель Гурвица:
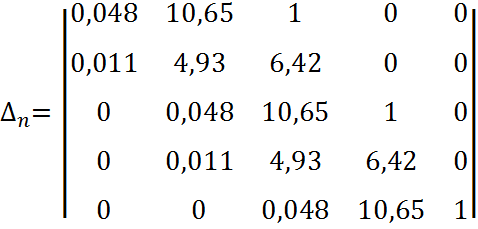 .
.
![]() .
.
![]() .
.
![]() .
.
![]() .
.
![]() .
.
Все миноры определителя Гурвица положительны, САУ устойчива.
1.6 Определение устойчивости системы по критерию Михайлова
Для устойчивой системы необходимо и достаточно, чтобы годограф Михайлова при изменении частоты от нуля до бесконечности повернулся против часовой стрелки, начиная с вещественной оси, на число квадрантов равное порядку характеристического уравнения, последовательно проходя эти квадранты.
Характеристическое уравнение:
![]() .
.
Произведём
замену ![]() , получим
характеристический вектор:
, получим
характеристический вектор:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.