М=Мст+Мдин , где М',Mст',Mдин'- соответственно движущий, статический и динамический моменты, приведенные к входному валу двигателя
С учетом передаточного числа, приведенные нагрузочные моменты определяются следующим образом[6]:
Мст=![]() ,
,
Мдин=![]() , где J-суммарный
момент инерции ЭД;
, где J-суммарный
момент инерции ЭД;
tц- время разгон(пуска).
Суммарный момент инерции определяется как:
J=δJдв+![]()
где δ-коэффициент, учитывающий момент инерции движущихся частей передаточного механизма (δ=1,1…1,3).
Преобразуем формулы (3.8), (3.9) для максимальных значений:
![]() =
=![]()
![]() =
=![]() =J
=J![]() .
.
Для выбранного ЭД в режиме S5 коэффициент инерции принимается δ=2. Значит по формулам (3.10), (3.11), (3.12) получим:
J=2*9.44*10-4+![]() =3.28*10-3(кг*м2);
=3.28*10-3(кг*м2);
![]() =
=![]() =3,125
(Н*м)
=3,125
(Н*м) ![]() =3,28*10-3*
=3,28*10-3*![]() =0,34
(Н*м).
=0,34
(Н*м).
Для участков с переменной скоростью момент, приведенный к валу ЭД, в соответствии с уравнением(3.7) равен:
-при пуске Mmax=3.465 Н*м;
-при торможении Mmin=2.785 Н*м.
На основе последних результатов
и диаграмм рисунка 2.2 строим уточненную нагрузочную диаграмму ЭП. На рисунке 3.2
изображены скоростная и уточненная нагрузочная диаграммы для статического, динамического
и движущего моментов, приведенных к валу двигателя. Здесь введено обозначение Муст=![]() =3,13
Н*м-это значение приведенного момента в установившихся режимах работы.
=3,13
Н*м-это значение приведенного момента в установившихся режимах работы.
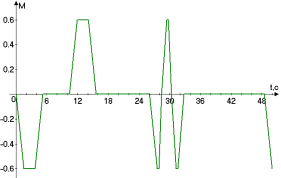
Рис.
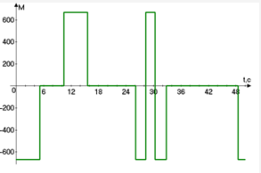
Рис.
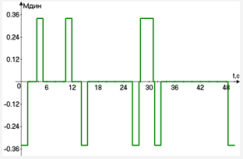
Рис.
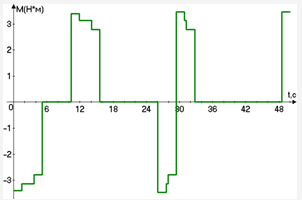
Рисунок 3.2-Скоростная и нагрузочная диаграммы ЭП
3.3 Проверка двигателя
При выборе ЭД наиболее важным требованием является недопустимость его перегрева при достаточном запасе мощности. Это необходимо для эффективной производительности ЭП и построенной на его основе машины. Нагревание двигателя обусловлено двумя видами потерь - постоянными и переменными. Постоянство потерь условно: постоянными они принимаются в силу их незначительного изменения.
Постоянные потери не зависят от нагрузки, т.е. от тока ЭД. К ним относят: потери на гистерезис и вихревые токи в стали магнитопровода, механические на трение в подшипниках и щеток о коллектор в машинах постоянного тока, вентиляционные потери. В ДПТ и синхронных ЭД с электромагнитным возбуждением к постоянным потерям прибавляют потери в обмотках возбуждения. В электрических машинах существуют ещё и дополнительные потери, которые также принято относить к постоянным потерям. Проверим ЭД методом эквивалентного момента. Этот метод применяется для двигателей, работающих с постоянным магнитным потоком(ДПТ независимого возбуждения и асинхронных двигателей, работающих при скольжениях, меньших критического). Условием правильного выбора ЭД по нагреву в данном случаем будет[6]:
Мэкв![]() Мном, где Мэкв - эквивалентный
момент;
Мном, где Мэкв - эквивалентный
момент;
Мном- номинальный момент двигателя, соответствующий техническим данным, но развиваемый в нашем случае при скорости вращения ωуст.
Для повторно-кратковременного режима работы определяются только моменты для рабочих участков:
Мэкв=![]() , где tц-время
цикла работы ЭП;
, где tц-время
цикла работы ЭП;
Mi-приведенный момент на i-ом рабочем интервале;
ПВрасч и ПВст- соответственно расчетное и стандартное(15, 25, 40, 60%) значения продолжительности включения ЭП.
Расчетное значение продолжительности включения определяется через уже известные величины:
ПВрасч=![]() =
=![]() ;
;
Выбранный двигатель является ДПТ закрытоко типа, поэтому берем следующие коэффициенты α0=0,75 и β0=0,5[6]
ПВрасч=![]() =16.2%.
=16.2%.
Ближайшим из стандартных значений продолжительности включения к значению (ПВ=35%), приведенному в задании проекта, является ПВст=40%.
Так как Mi=Mуст, то здесь получаем:
Мэкв=![]() =
Муст
=
Муст![]() ;
;
Мэкв= 3.13![]() =0.21(Н*м).
=0.21(Н*м).
Так же по уточненной нагрузочной диаграмме ЭП следует проверить перегрузочную способность двигателя:
Mmax![]() Mдоп, где Mmax-максимальное
значение приведенного к валу двигателя момента.
Mдоп, где Mmax-максимальное
значение приведенного к валу двигателя момента.
Согласно уточненной нагрузочной диаграмме ЭП (см.рисунок 3.2) можем записать, что:
Мmax=![]() ;
;
Мmax=3,13+0,34=3,17 (Н*м).
В итоге получаем, что условия(3.13), (3.16) выполняются:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.