После механической обработки поршни подаются шаговым транспортером в две камеры моечной машины 7, где промываются водным раствором соды и затем просушиваются сухим сжатым воздухом. Из камер поршни выталкиваются на поддон 6 и замыкают контакты блокирующих микровыключателей, при этом сигнал о наличии на позиции захвата поршней поступает на пульт управления 8 робота. Установленный рядом с моечной машиной манипулятор робота специальными схватами берет поршни с поддона 6 и раскладывает их в ячейки четырех ящиков 2.Ящики устанавливаются на тумбочках 3 по направляющим до упора (конечного выключателя), подающего сигнал на пульт управления робота о наличии тары. Программа движения манипулятора составлена так, что при отсутствии поршня на поддоне 6 моечной машины 7 рука робота проходит в зону захвата и ожидает появления поршня. При отсутствии ящика на загрузочной позиции робот останавливается. Загруженные ящики во время работы передвигаются с тумбочек на тележку и заменяются пустыми.
Данную линию обслуживает электромеханический робот, работающий в ангулярной сферической системе координат. Разрабатываемый привод нижней руки является приводом вращательного движения. Кинематическая схема такого ЭП приведена на рисунке 1.3.
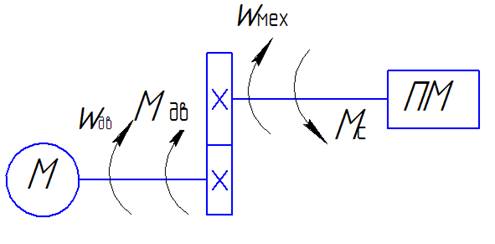
Рисунок 1.3-Кинематическая схема ЭП передней руки: М-электродвигатель; P-редуктор; ПМ-производственный механизм; Wдв, Wмех-угловые скорости соответственно вала двигателя и механизма; Мдв, Мс-вращающий момент, развиваемый двигателем, и момент сопротивления, создаваемый механизмом.
2. Приближенная нагрузочная диаграмма
2.1 Расчет сил и моментов, действующих в электроприводе
В работе рассматривается ЭД, который приводит производственный механизм (в данном случае нижнюю руку) через определенный передаточный механизм (редуктор). Всю эту механическую систему считаем абсолютно жесткой. Так, как об ЭД пока ничего неизвестно, то силы и моменты, действующие в ЭП, будем сначала приводить к валу двигателя.
При расчетах будем учитывать следующие основные допущения:
-уравновешивающие силы не учитываются;
-трение в элементах передачи учитываются через КПД передачи;
-сечения элементов принимаем постоянными с расположением максимума по середине.
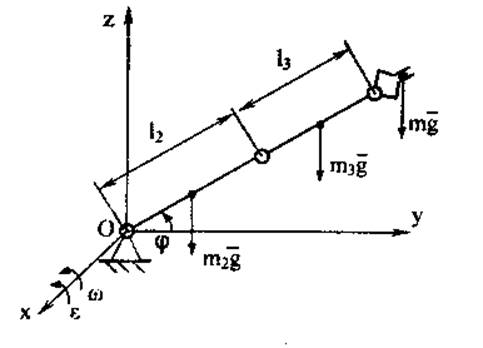
Рисунок 2.1 –Механизм поворота передней руки
Согласно рисунку 2.1 силы тяжести m2g, m3g,mгg создают относительно шарнира, в котором расположен разрабатываемый ЭП для передней руки, статический момент[4]:
Мст'=m2gl’2/2+m3g(l’2+l’3/2)+mгg(l’2+l’3),
где φ-угол поворота нижней
руки; m1, m2,m3- массы нижней руки, верхней руки,
груза; l’2=![]() cosφ;
l’3=
cosφ;
l’3=![]() cos
cos![]() ,
,![]() -длинны
нижней и верхней рук.
-длинны
нижней и верхней рук.
Момент инерции рассчитаем, считая звенья тонкими стержнями, а груз-точкой:
Jмех=m2![]() /12+m3/3(l’2+l’3/2)2+mг/3(l’2+l’3)2
/12+m3/3(l’2+l’3/2)2+mг/3(l’2+l’3)2
Динамический момент и его максимальное значение в этом случае:
Мдин'=Jмехε,
![]() =Jмехεmax
=Jмехεmax
Движение входного звена производственного механизма привода списывается уравнением равновесия моментов:
М'=Мст'+Мдин', где М',Mст',Mдин'-соответственно движущий, статический и динамический моменты, приведенные к входному валу двигателя.
Максимальный приведенный момент:
![]() =
=![]() +
+![]()
Подставив в формулы (2.1), (2.2), (2.4), (2.6) числовые значения, получаем:
Максимальный момент достигается при φ=0
![]() =(43,5*1,55/2+14(1,55+0,5/2)+5*(1,55+0,5))9,81=678,45(Н*м)
=(43,5*1,55/2+14(1,55+0,5/2)+5*(1,55+0,5))9,81=678,45(Н*м)
Jмех=43.5*3.1/2+14(0.25/3+3.2)+5*(1.55+0.5)2=90.65(кг*м2)
![]() =90,65*0,41=37,17(Н*м)
=90,65*0,41=37,17(Н*м)
![]() =678,48+37,17=715,65(Н*м).
=678,48+37,17=715,65(Н*м).
2.2 Определение составляющих времени нагрузочной диаграммы
В данном подразделе необходимо определиться с циклом работы ЭП рассматриваемого ПР.
Согласно описанию техпроцесса (см.раздел 1) робот 1 выполняет следующие действия:
1) манипулятор робота специальными схватами берет поршни с поддона, при отсутствии поршня на поддоне рука робота проходит в зону захвата и ожидает появления поршня;
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.