Лабораторная работа №2
Исследование влияния жестких и гибких обратных связей охватывающих нелинейный элемент на динамику системы.
Цель работы: исследование динамики многоконтурных нелинейных систем
Особенностью нелинейных систем является возможность возникновения устойчивого периодического режима как при свободном движении так и при вынужденном движении - режима автоколебаний. Амплитуда и частота автоколебаний зависят от параметров линейной части системы и внешнего воздействия. Режим автоколебаний чаще всего возникает при наличии в системе неоднозначной (гистерезисной) нелинейной зависимости, и если линейная часть системы неустойчива, то такой режим возникает при наличии ограничения (насыщения) нелинейной функции. В то же время нелинейные системы широко используются при автоматизации технологических процессов. Это связано с рядом достоинств; в частности релейные системы обладают высоким быстродействием и могут обеспечивать высокую точность, поэтому релейные регуляторы получили широкое распространение. В релейных системах либо регулирующий орган работает в релейном режиме (окрыто-закрыто, включено-выключено), либо используется релейное управление приводом регулирующего органа (т.н. привод постоянной скорости – “сервомотор” постоянной скорости).
Двухпозиционные регуляторы (Pn-регуляторы) являются регуляторами приборного типа, содержат: схему измерения, элемент сравнения, усилитель- двухпозиционное реле. Такой регулятор прекращает или полностью восстанавливает приток энергии (вещества) в объект.
Трёхпозиционные регуляторы – регуляторы постоянной скорости (Pc-регулятор) также являются регуляторами приборного типа и содержат: схему измерения, элемент сравнения и два двухпозиционных элемента или один – трёхпозиционный. В комплект Pc-регулятора входит исполнительный механизм, как отдельный самостоятельный блок, который выполняет функцию привода регулирующего органа. Обмотка исполнительного механизма переключается релейно, обеспечивая вращение его вала в разные стороны – перемещая PO с постоянной скоростью из одного крайнего положения в другое.
Таким образом, двухпозиционный (Pn-регулятор) имеет следующую нелинейную характеристику (рис. 1)
Рис.1
где 2а – зона неоднозначности.
При использовании этого регулятора в системе устанавливается режим автоколебаний, если она одноконтурная, и линейная часть имеет характеристическое уравнение не ниже второго порядка.
Pc-регулятор имеет нелинейную характеристику – трёхпозиционное реле с зоной неоднозначности или без неё. (рис. 1)
Рис.2
где 2а – зона нечувствительности,
![]() - зона неодназначности.
- зона неодназначности.
Для улучшения динамики релейных систем автоматического управления используют следующие методы:
- последовательная коррекция (введение производных и интеграла в закон управления);
- коррекция с помощью обратных связей (охват местной жесткой или гибкой ОС релейного элемента);
- введение контура управления по возмущению (комбинированное управление).
Целью коррекции нелинейных систем является расширение области устойчивости и подавление режима автоколебания. Качественные показатели работы релейных систем зависят от:
- ширины зоны нечувствительности, которая способствует “успокоению” колебаний, но её расширение снижает точность системы;
- ширины зоны неоднозначности (гистерезиса), которая “раскачивает” колебания и увеличивает их амплитуду.
Введение жёсткой обратной связи к релейному элементу линеаризует систему и приближает закон регулирования к линейному (пропорциональному). Гибкие обратные связи, введённые к релейному элементу создают линейный скоростной режим работы регулятора (астатический регулятор), при некоторых условиях можно обеспечить скользящие режимы работы (оптимальные по точности и быстродействию системы). Улучшение работы релейных систем может быть достигнуто с помощью “вибрационной линеаризации”, а также регулированием “неполным притоком”.
Методические указания.
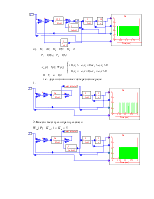
Функциональную схему нелинейной САУ можно представить следующим образом: (рис. 3)
Рис.3
Для следящей системы, если для управления исполнительным механизмом (ИМ) необходима значительная мощность, (УМ), а увеличение габаритов и веса усилителя нежелательно, можно использовать следующую структурную схему: (рис. 4)
Рис.4
Y(x2) – нелинейный элемент (2-х позиционное реле, 3-х позиционное реле, усилитель с ограничителем).
![]() ,
, ![]() –
передаточные функции местных обратных связей (гибкая или жёсткая).
–
передаточные функции местных обратных связей (гибкая или жёсткая).
При исследовании системы необходимо снять графики изменения выходной координаты и её скорости, а также изменения сигнала на выходе нелинейного элемента.
Рис.5
Порядок выполнения работы.
1. Смоделировать схему представленную на рис.5, задать параметры линейной части системы и вид нелинейности:
а). ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
-двухпозиционное идеальное реле.
2. Ввести жесткую обратную связь:

3. Ввести гибкую обратную связь:
4.Ввести гибкую обратную связь:
5. Ввести
одновременно ![]() и
и 
б).
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
-т.е. двухпозиционное гистерезисное реле.
1. 
2. Ввести жесткую обратную связь:
3. Ввести гибкую обратную связь:
4. Ввести гибкую обратную связь:
5. Ввести
одновременно ![]() и
и
в).
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
- трёхпозиционное реле.
1.
2. Ввести жесткую обратную связь:
3. Ввести гибкую обратную связь:
4.Ввести гибкую обратную связь:
5. Ввести
одновременно ![]() и
и
2.Ввести жесткую обратную связь:
снять
графики изменения ![]() Оценить влияние
Оценить влияние ![]()
3. Ввести гибкую обратную связь:
![]()
![]()
Снять
графики изменения ![]() и оценить влияние
параметров ОС на переходный процесс системы.
и оценить влияние
параметров ОС на переходный процесс системы.
4.Ввести гибкую обратную связь:
![]()
![]()
![]()
Снять
графики изменения ![]() и оценить влияние
параметров ОС на переходный процесс системы.
и оценить влияние
параметров ОС на переходный процесс системы.
5.
Ввести одновременно ![]() и
и
Содержание отчета.
1. Схемы моделирования САУ.
2. Выводы о влиянии ОС и их параметров на качество системы.
3. Графики изменения координат системы при наличии местных обратных связей с различными типами нелинейных элементов и без них.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.