3. Принцип управления по замкнутому контуру (принцип отрицательной обратной связи или принцип компенсации отклонений регулируемой величины) состоит в сравнении требуемого изменения регулируемой переменной, определяемого управляющим воздействием, с действительным ее изменением (рис.1.6). В этом случае корректирующее устройство КУ называют автоматическим регулятором (АР), который структурно включает задающее устройство ЗУ, обеспечивающего требуемый закон изменения заданного значения xЗ(t) регулируемой величины x(t) (управляющего воздействия), датчик регулятора (или просто датчик) Д с коэффициентом передачи kД, предназначенный для измерения регулируемой величины, регулятор Р, предназначенный для выработки управляющего воздействия y(t), и устройство сравнения УС, обеспечивающее выработку сигнала
e(t)= xЗ(t) – x(t),
равного сигналу ошибки регулирования величины x(t)[3].
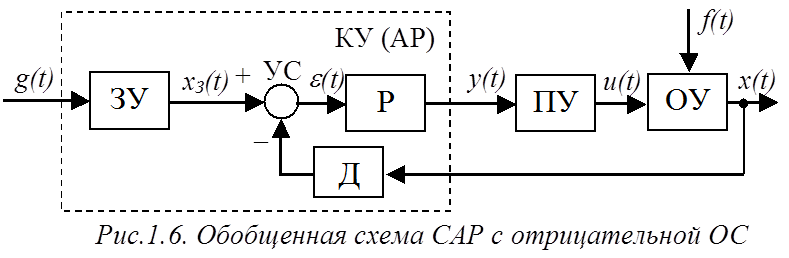
При наличии ПУ автоматический регулятор называется регулятором непрямого действия, при отсутствии ПУ – регулятором прямого действия [1].
 По сути, функциональным
назначением устройства сравнения УС здесь, а также в схеме рис.1.5, является
алгебраическое суммирование входных сигналов, поэтому его еще часто называют сумматор.
В схемах при наличии УС обозначение входных линий "+" для упрощения
может опускаться.
По сути, функциональным
назначением устройства сравнения УС здесь, а также в схеме рис.1.5, является
алгебраическое суммирование входных сигналов, поэтому его еще часто называют сумматор.
В схемах при наличии УС обозначение входных линий "+" для упрощения
может опускаться.
Иногда используется также старое обозначение сумматоров:
Входы, на которые сигнал подается со знаком "–", заштриховываются.
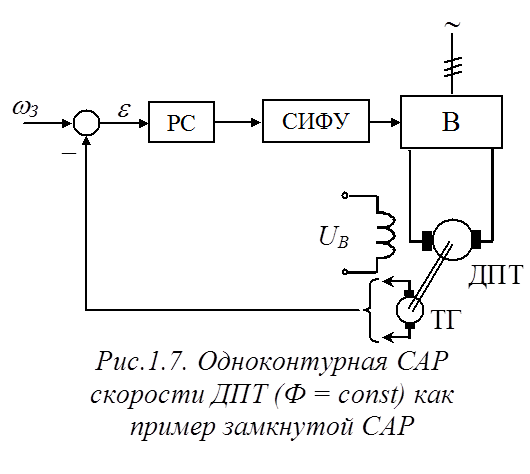
Организация управления по этому принципу является эффективным методом борьбы с возмущениями, а также существенно снижает чувствительность САР к изменению ее параметров. Примерами такой САР являются одноконтурные системы управления скоростью электродвигателей (рис.1.7).
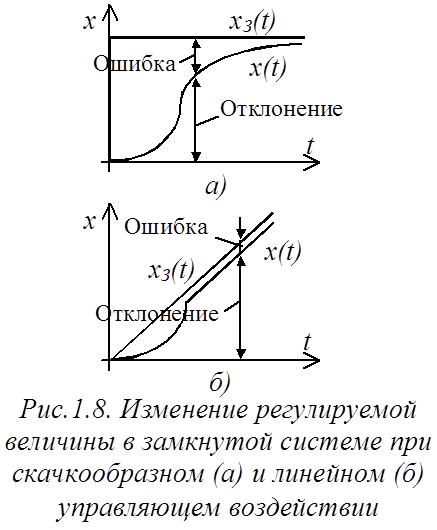
При ограничении выходного сигнала регулятора характер изменения величин xЗ(t) и x(t) имеет вид, показанный на рис.1.8а (положено, что kД=1).
Отклонением регулируемой величины принято называть разность между значением регулируемой величины в данный момент времени и некоторым начальным ее значением (соответствующего моменту времени до подачи управляющего воздействия). При неограниченно возрастающих управляющих воздействиях отклонение регулируемой величины является также неограниченно возрастающей функцией времени, тогда как ошибка e(t) в удовлетворительно работающей системе всегда остается ограниченной (рис.1.8б).
4. Использование принципа комбинированного управления позволяет эффективно производить и компенсацию отклонений, и компенсацию возмущений. САР в этом случае (рис.1.9) представляет собой комбинацию рассмотренных САР, и автоматический регулятор АР в этом случае имеет более сложную структуру по сравнению с АР при управлении с компенсацией отклонений (рис.1.5).
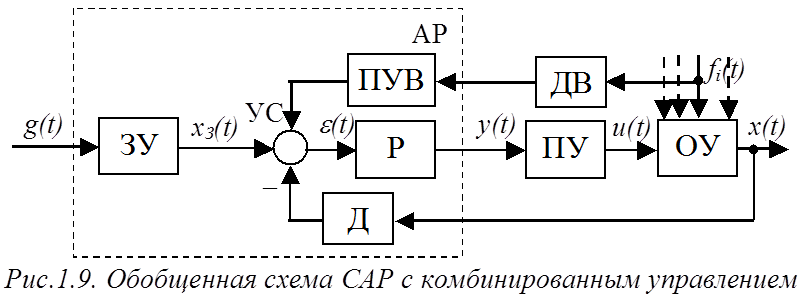
Для большей эффективности такой системы измеряются и компенсируются лишь самые трудноотрабатываемые возмущения fi(t), а неточную работу системы и действие других возмущений устраняют с помощью отрицательной обратной связи.
Классификации систем автоматического регулирования
В зависимости от возлагаемых задач САР можно подразделить на три основных класса [2]:
· системы автоматической стабилизации, в которых составляющие вектора задания ![]() (рис.1.2), то есть, задающие
воздействия, представляют собой заданные постоянные величины;
(рис.1.2), то есть, задающие
воздействия, представляют собой заданные постоянные величины;
· системы программного регулирования, в которых одно или несколько задающих воздействий являются известными функциями времени, а остальные – заданными постоянными величинами;
· следящие системы, в которых все или некоторые управляющие воздействия представляют собой заранее неизвестные функции времени.
Для пояснения этой классификации используем систему рис.1.6, предположив, что задающее воздействие wЗ(t) соответствует некоторому напряжению, снимаемому с потенциометра. В случае, когда движок потенциометра неподвижен, напряжение, снимаемое с его движка, следовательно, и сигнал wЗ(t), является постоянным, мы имеем систему автоматической стабилизации скорости электродвигателя постоянного тока. Если же движок потенциометра перемещается (например, при помощи кулачкового механизма), снимаемое с него напряжение является заданной функцией времени, и система рис.1.6 может рассматриваться как система программного регулирования скорости. Наконец, если движок потенциометра перемещается (вручную или автоматически), например, в соответствии с изменяющимися показаниями какого-либо измерительного прибора, мы имеем следящую систему.
Кроме того, по этой же классификации выделяют так называемые экстремальные САР, задача которых состоит в поддержании некоторой регулируемой переменной, определяемой принятым критерием качества, на экстремальном уровне (например, регулирование с максимальным КПД и др.).
Системы стабилизации реализуются в основном при регулировании по отклонению. При этом использование регуляторов, осуществляющих аналитические преобразования сигнала ошибки (например, усиление при П-регуляторе) позволяет уменьшить, но не устранить ошибку регулирования даже в установившемся режиме. Регулирование, при котором установившаяся (статическая) ошибка при постоянном сигнале задания зависит от возмущающего воздействия (нагрузки), называется статическим. При этом под статизмом понимают относительную статическую ошибку при изменении нагрузки от нуля (холостой ход) до нормального значения (номинального).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.