Преобразующее устройство предназначено для преобразования слабого по мощности сигнала y(t) в мощное силовое воздействие u(t) на объект. Реализуется в основном на основе вычислительных и усилительных элементов.
Решение проблемы регулирования состоит из следующих этапов:
1. Выбор датчиков для измерения выходных переменных ОУ;
2. Выбор преобразующих устройств для воздействия на ОУ;
3. Разработка математических моделей ОУ, датчика и ПУ;
4. Проектирование корректирующего устройства на основе разработанных моделей и принятых критериев качества (о них ниже);
5. Оценка результатов синтеза САР аналитически, путем математического моделирования и, наконец, на экспериментальном стенде (путем физического моделирования);
6. Если испытание экспериментального образца дает неудовлетворительные результаты, следует повторить этапы 1 – 5.
Критерии качества регулирования
Основным требованием, предъявляемым к САР, является обеспечение в допустимых пределах значений ошибок между требуемыми и действительными изменениями регулируемых величин. Системы, для которых эти ошибки равны нулю во все моменты времени, называются идеальными или инвариантными, но на практике такие системы реализовать невозможно. Поэтому при проектировании САР обычно вводится какой-либо критерий эффективности или критерий качества регулирования, определяющий оптимальные условия работы системы. В этом случае САР называют оптимальной.
На практике даже оптимальная САР, удовлетворяющая принятому критерию качества, может быть реализована лишь с большей или меньшей степенью приближения. При этом, чем выше эта степень приближения, т.е. чем меньше отклонения регулируемых переменных и, следовательно, чем выше качество регулирования, тем сложнее оказывается САР. Поэтому при проектировании САР нужно стремиться к разумному компромиссу между достижением возможно более высокого качества работы системы и использованием при этом возможно более простых технических средств.
Вследствие этого при проектировании САР, наряду с критерием качества регулирования, необходимо располагать требованиями, определяемыми допустимые условия работы системы. Требования, предъявляемые к САР, можно разделить на следующие категории:
Основные принципы управления
Качество регулирования определяется прежде всего выбранным принципом управления. Основными принципами управления являются:
1. Простейший способ управления – выработка воздействий программного типа (типа приказа). При этом реализуется принцип управления по разомкнутому контуру (разомкнутое управление). В таких системах (рис.1.3) часто не требуется корректирующего устройства КУ, и не возникают задачи устойчивости. Примерами такой системы являются разомкнутые системы параметрического управления электродвигателями (рис.1.4).
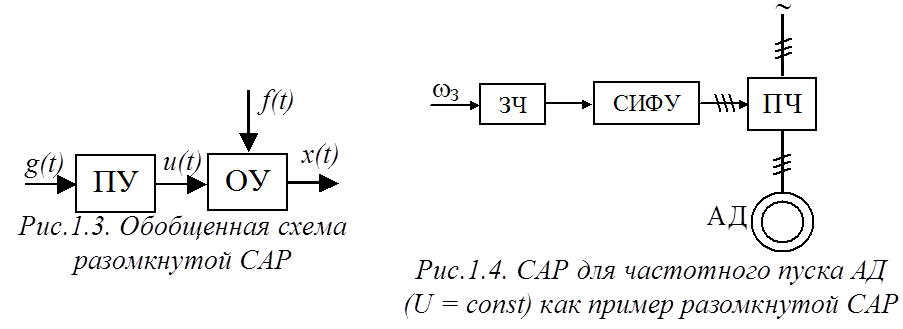
Важным недостатком разомкнутой САР является ее чувствительность к изменению ее параметров.
2. Использование принципа компенсации возмущений предполагает, что возмущение f(t) достаточно просто и недорого можно измерить с помощью соответствующих датчиков[2]. САР в этом случае (рис.1.5), помимо основного канала доставки к ОУ управляющего воздействия, содержит канал компенсации возмущения с датчиком ДВ, измеряющим возмущение, и преобразующим устройством ПУВ, причем последнее, как правило, реализуется в составе корректирующего устройства КУ.
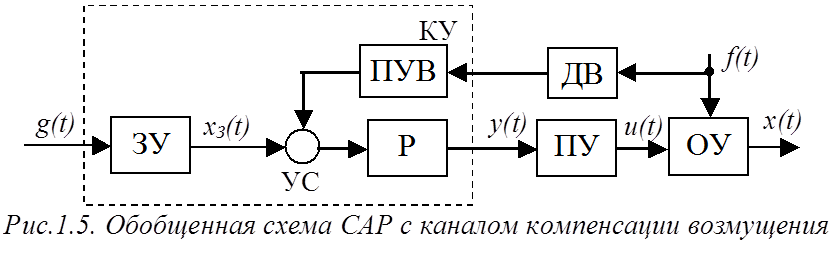
Кроме того, КУ содержит задающее устройство ЗУ, узел сравнения УС и регулятор Р, обычно в этом случае представляющий собой усиливающий элемент. Параметры ПУВ для эффективной компенсации возмущения f(t) выбираются таким образом, чтобы составляющая Du(t) управляющего воздействия u(t), обусловленная действием канала компенсации возмущения, обеспечивала нейтрализацию возмущения f(t) в точке его приложения.
Следует отметить, что использование сумматора (УС) в составе КУ справедливо тогда, когда приложение возмущения в математической модели объекта управления ОУ может быть описано путем его алгебраического сложения с каким-либо сигналом, непосредственно находящимся в канале управления, и участвующего в формировании выходного сигнала. В других случаях (например, при нелинейной модели узла приложения возмущения в ОУ) в составе КУ вместо УС должен использоваться соответствующий подходящий элемент (блок перемножения, блок деления и т.д.), причем рассмотренный принцип компенсации возмущения остается полностью справедливым.
Данный принцип организации управления становится неэффективным, когда имеет место большое число возмущений и канал компенсации становится дорогим, а также в случаях, когда возмущение не удается достаточно точно измерить. Применительно к электроприводу к числу возмущений, для нейтрализации действия которых используется указанный принцип, относятся противо-ЭДС электродвигателя, а также статический момент, приложенный к валу двигателя и обусловленный наличием нагрузки.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.