Лекция 1
(4 часа)
ВВЕДЕНИЕ. ОСНОВНЫЕ ПОНЯТИЯ И ТЕРМИНЫ
Предмет теории автоматического управления. Задачи курса
Совершенствование технологии и повышение производительности работы во всех отраслях промышленности возможно только при широкой автоматизации, то есть при внедрении систем автоматического управления (САУ) как отдельными объектами, так и производством в целом. Учитывая широкое распространения электропривода во многих отраслях промышленности, для качественного управления электроприводами различных производственных механизмов необходимо знание основ курса «Теория автоматического управления» (ТАУ), который является одним из базовых для студентов, обучающихся по направлению «Электромеханика».
Цель курса – дать будущим специалистам-электромеханикам знания, связанные с обеспечением автоматизации управления электромеханическими объектами и их силовой основой – автоматизированным электроприводом.
В результате изучения курса студент должен знать основы теории построения замкнутых САУ, основные методы их анализа и синтеза, а также уметь использовать эти знания применительно к реальным электромеханическим системам.
Сжатый исторический обзор развития ТАУ
Рациональная деятельность людей издревле сопровождается различного рода системами. Во все времена люди интересовались поведением естественных (природных) систем, чтобы прогнозировать природные явления, и, в свою очередь, создавали искусственные системы с конкретным целевым назначением, характеризующиеся конкретными признаками.
Как самостоятельная научная дисциплина, ТАУ начала формироваться в 30-х годах XIX в. на основе развития отдельных направлений теоретической механики для решения конкретных задач. В России это было связано с необходимостью разработки теоретических методов, позволяющих определять параметры центробежных регуляторов паровых машин.
С 1870 начинают разрабатываться автоматические системы и регуляторы, работающие с использованием электрической энергии.
С 1932 развивается ТАУ применительно к электрическим машинам и регуляторам.
Литература: [2].
Понятие системы управления. Сущность автоматического управления.
Совокупность элементов любой физической природы и процессы, наблюдаемые в них, обладающие свойствами целеустремленности, называется системой. Наличие цели управления (целеустремленности) является фундаментальным признаком системы. Цели природных систем чаще всего неизвестны, но цели искусственных систем известны всегда. Примеры систем: Солнечная система (с ее стабилизацией орбит и излучением энергии), капиталистическая и социалистическая системы организации общества, системы стабилизации определенного параметра (давления, температуры, скорости и др.) в разных отраслях промышленности.
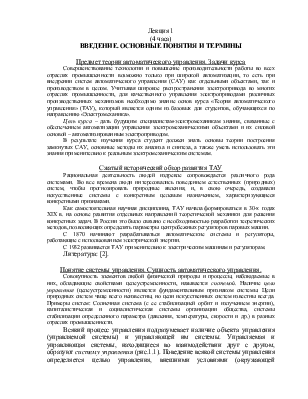
Всякий процесс управления подразумевает наличие объекта управления (управляемой системы) и управляющей им системы. Управляемая и управляющая системы, находящиеся во взаимодействии друг с другом, образуют систему управления (рис.1.1). Поведение всякой системы управления определяется целью управления, внешними условиями (окружающей обстановкой) и внутренними условиями (свойствами управляемой системы и объекта управления).
Система управления называется автоматической, если основные функции управления, необходимые в процессе работы системы для достижения цели управления, осуществляются в ней без непосредственного участия человека. В случае, если участие человека проявляется лишь в формировании управляющего воздействия, система управления называется полуавтоматической. Основная задача курса ТАУ заключается в анализе и синтезе целенаправленного управления объектами управления нормальной сложности.
Всякое улучшение поведения системы называется коррекцией, а, учитывая то, что в хорошей системе должны действовать хорошие управления, под коррекцией можно понимать и улучшение управлений.
Факторы, изменяющие поведение системы, называются воздействиями на эту систему. Среди воздействий можно выделить управляющие (u1, u2, …, um) и возмущающие (f1, f2, …, fk). Факторы, способствующие достижению системой цели, называются управляющими воздействиями (управлениями), а факторы, мешающие системе достичь цели, – возмущающими воздействиями (возмущениями).
Объект управления (ОУ) – это то, к чему приложены управления и возмущения, полностью определяющие выходные показатели (x1, x2, …, xn) (переменные состояния). Любой технический процесс может выступать в роли объекта управления.
Совокупность переменных y1, y2, …, yl, представляющих собой различные комбинации параметров и выходных показателей ОУ, сведения об изменении которых поступают на управляющую систему, называются наблюдаемыми переменными. В наиболее частом на практике случае применительно к техническим системам наблюдаемыми переменными могут быть переменные состояния xi.
Рассмотренные переменные xi, yi, ui и fi называются обобщенными координатами системы или просто координатами, которые в общем случае являются функциями времени t.
Часто координаты рассматривают как компоненты многомерных вектор-функций:
 ;
;  ;
;  ;
;  ,
,
которые называются векторами состояния, наблюдения, управления и возмущения соответственно.
Объекты управления в зависимости от реакции на входные
воздействия подразделяются на устойчивые, нейтральные и неустойчивые.
Допустим, в некоторый начальный момент времени ![]() при
входных воздействиях
при
входных воздействиях ![]() ,
, ![]() выходная
переменная имеет значение
выходная
переменная имеет значение ![]() . Пусть на
какое-то время T хотя бы одно из входных воздействий изменяется на
конечную величину (
. Пусть на
какое-то время T хотя бы одно из входных воздействий изменяется на
конечную величину (![]() или
или ![]() ), а затем принимает первоначальное
значение (
), а затем принимает первоначальное
значение (![]() и
и ![]() при
при
![]() ). Если после этого выходная
переменная со временем принимает свое первоначальное воздействие
). Если после этого выходная
переменная со временем принимает свое первоначальное воздействие  , то ОУ называется устойчивым;
если выходная переменная принимает новое постоянное значение
, то ОУ называется устойчивым;
если выходная переменная принимает новое постоянное значение  , ОУ называется нейтральным;
если же выходная переменная не стремится к какому-либо постоянному значению
(предел не существует), то ОУ называется неустойчивым.
, ОУ называется нейтральным;
если же выходная переменная не стремится к какому-либо постоянному значению
(предел не существует), то ОУ называется неустойчивым.
Определяющую роль при создании и изучении систем играет математическая модель системы – некоторое математическое описание, которое должно адекватно отображать реальные процессы в объекте. Для систем, установившиеся и переходные режимы работы которых описываются дифференциальными уравнениями, математическая модель записывается в виде[1]:
 .
.
В зависимости от числа n вводимых в
рассмотрение составляющих вектора состояния ![]() ,
различают одномерные (n=1), двухмерные
(n=2) и многомерные
САУ.
,
различают одномерные (n=1), двухмерные
(n=2) и многомерные
САУ.
Понятие автоматического регулирования.
Традиционно проблема автоматического регулирования рассматривается как частный случай проблемы автоматического управления, ориентированная на определенный класс динамических САУ – системы автоматического регулирования, представляющие собой замкнутые активные динамические системы направленного действия. Таким образом, управление – более широкое понятие, чем регулирование.
Применительно к электромеханике можно дать следующее определение: системой автоматического регулирования (САР) называется динамическая система, обеспечивающая отработку заданного сигнала с требуемой точностью при помощи использования результатов сравнения заданных и действительных значений регулируемых координат для управления источниками энергии.
Применительно к промышленным техническим системам САР можно представить в виде последовательности блоков, соответствующих объекту управления ОУ, преобразующему устройству ПУ и корректирующему устройству КУ. На рис.1.2 представлена обобщенная схема такой системы для случая, когда присутствует только одна регулируемая величина (наличие связей, показанных прерывистыми линиями, зависит от выбранного принципа управления, о которых ниже).
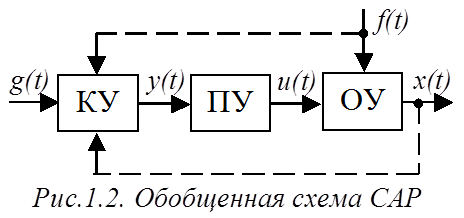
Корректирующее устройство предназначено для выработки управляющего сигнала малой мощности, обозначенного y(t) (рис.1.2), в зависимости от задающего сигнала g(t) (отражающего цель регулирования – рис.1.1) и текущего состояния САР. В общем случае может состоять из требуемого количества датчиков измерения координат, узлов сравнения и узла формирования сигнала y(t).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.