![]()
|
 |
||||||||
|
g(t)=0
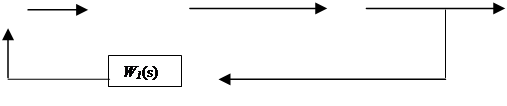
Рис.1.12
Эквивалентная передаточная функция системы, структурная схема которой изображена на рис.1.12, может быть выражена как
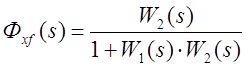 ;
;

 .
.
Схема моделирования в Matlab представлена на рис.1.13
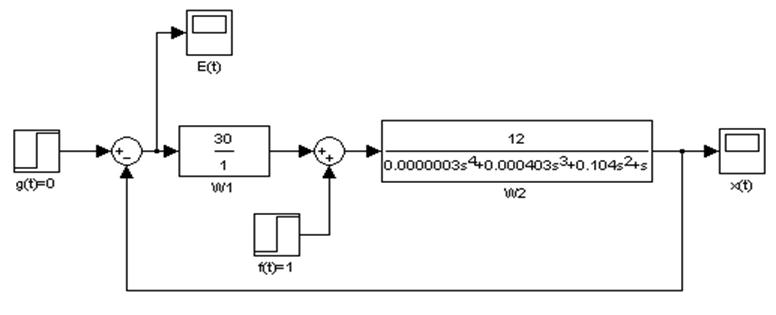
Рис.1.13
Переходная характеристика замкнутой системы при нулевом задающем воздействии изображения на рис.1.14.
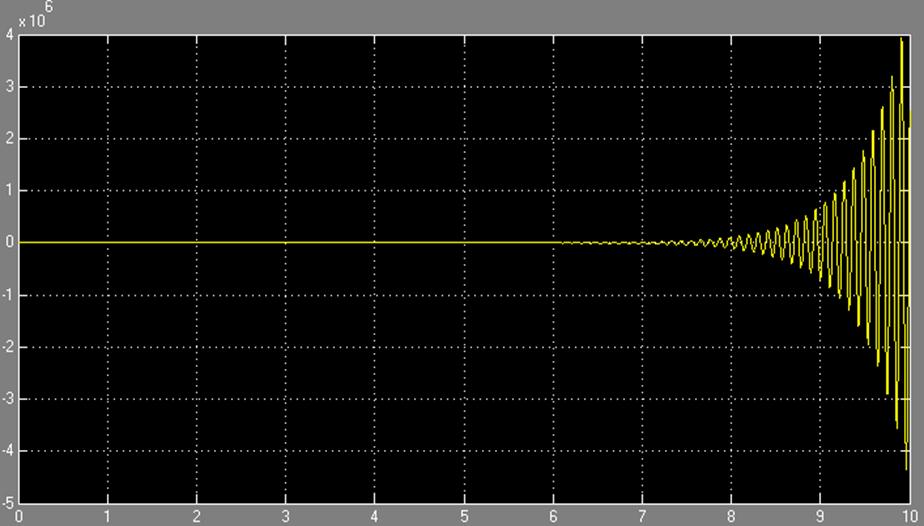
Рис.1.14
Структурная схема замкнутой системы при нулевом задающем воздействии представлена на рис.1.15. Выходной сигнал – ошибка.
![]() g(t)=0
g(t)=0
![]()
![]()
![]()
|
 |
||||
Рис.1.15
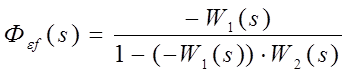
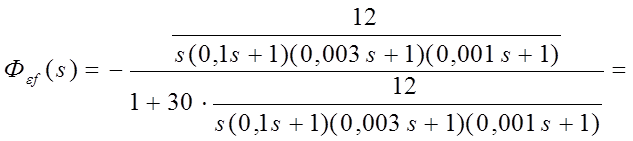
Эквивалентная передаточная функция системы по ошибке, структурная схема которой изображена на рис.1.15, может быть выражена как
 ;
;

Переходная характеристика ошибки замкнутой системы изображена на рис.1.16.
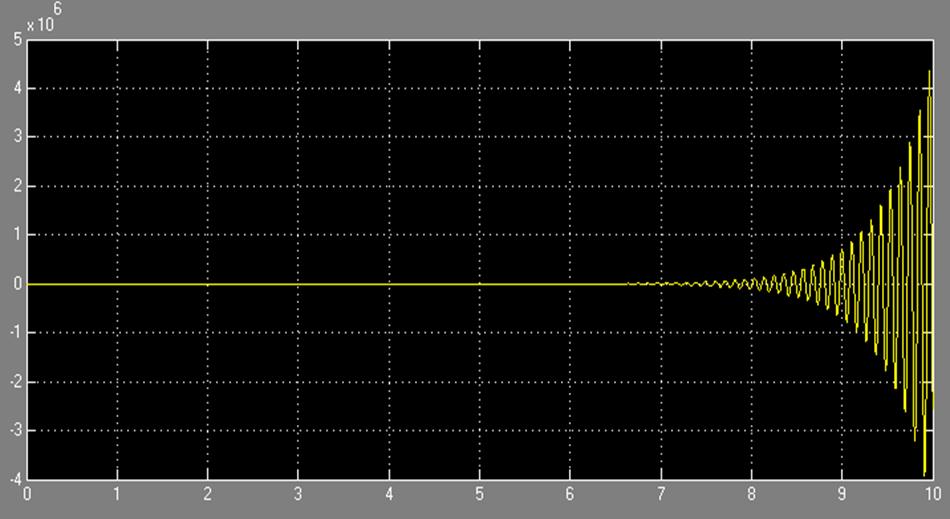
Рис.1.16
В ходе анализа структуры нескорректированной САУ были получены передаточные функции и переходные характеристики в разомкнутом и замкнутом состоянии.
2.Анализ устойчивости нескорректированной САУ.
2.1.Критерий Гурвица.
Алгебраический критерий Гурвица звучит следующим образом: необходимым и достаточным условием устойчивости замкнутой САУ будет выполнение условия, согласно которому все определители матриц составленных из коэффициентов характеристического уравнения должны иметь тот же знак что и b0.
Передаточная функция замкнутой системы имеет вид
 .
.
Характеристическим полиномом замкнутой системы является знаменатель ее передаточной функции
![]() .
.
Из полученного характеристического полинома определяют коэффициенты
b0=0.0000003, b1=0.000403, b2=0.104, b3=1, b4=360.
b0>0
![]()
![]()

![]()

![]()
Условие устойчивости по критерию Гурвица не выполняется. Система не устойчива.
2.2.Критерий Найквиста.
Замкнутая система устойчива, если при изменении частоты от 0 до +∞ годограф передаточной функции разомкнутой САУ охватывал точку (–1 ,j0) λ/2 раз, вращаясь в положительном направлении.
В рамках критерия Найквиста рассматривают передаточную функцию разомкнутой системы, которая имеет вид
 .
.
Откуда характеристическое уравнение будет выражено как
![]() .
.
Корни характеристического уравнения разомкнутой системы можно найти с помощью Matlab (рис.2.1)
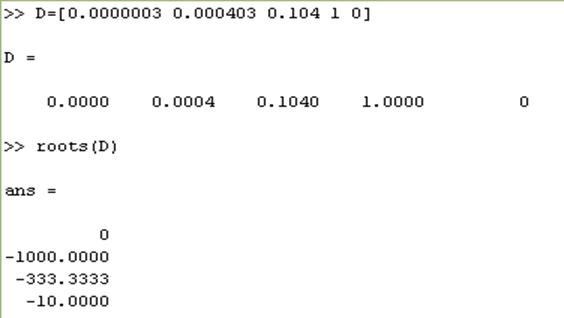
Рис.2.1
Все корни характеристического уравнения расположены в левой полуплоскости.
Построение АФХ можно выполнить с помощью Matlab (рис.2.2):
![]()
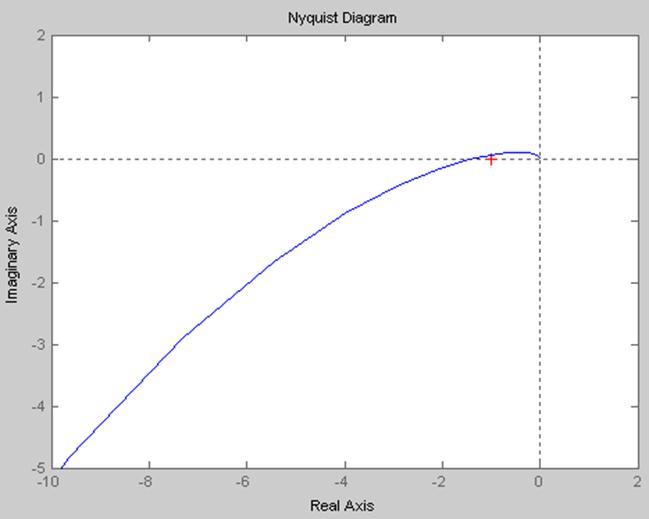
Рис.2.2
Годограф передаточной функции разомкнутой САУ, изображенный на рис.2.2 охватывает точку (–1 ,j0). Что говорит о не устойчивости системы.
2.3.Критерий Михайлова.
Для устойчивости линейной САУ необходимым и достаточным условием является то, что годограф Михайлова при изменении частоты от 0 до +∞, начав движение из точки, лежащей на положительной вещественной полуоси, вращаясь только против часовой стрелки, нигде на обращаясь в нуль, прошел последовательно n-квадрантов и повернулся на угол nπ/2, где n– степень характеристического полинома.
Передаточная функция замкнутой системы имеет вид
 .
.
Откуда характеристическое уравнение можно записать как
![]() .
.
С помощью Matlab можно определить корни характеристического уравнения замкнутой системы (рис.2.3)
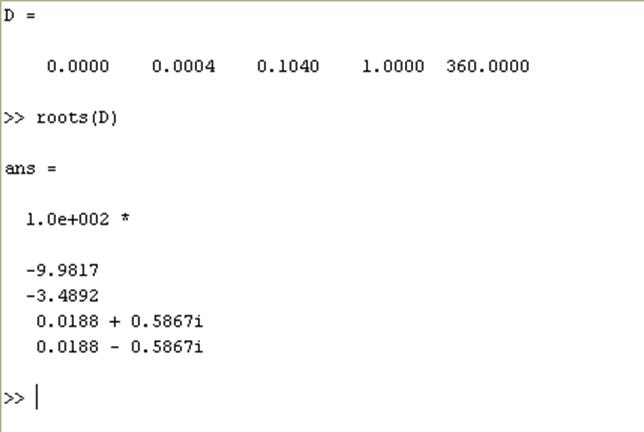
Рис.2.3
На рис.2.4 изображен годограф Михайлова для замкнутой системы.
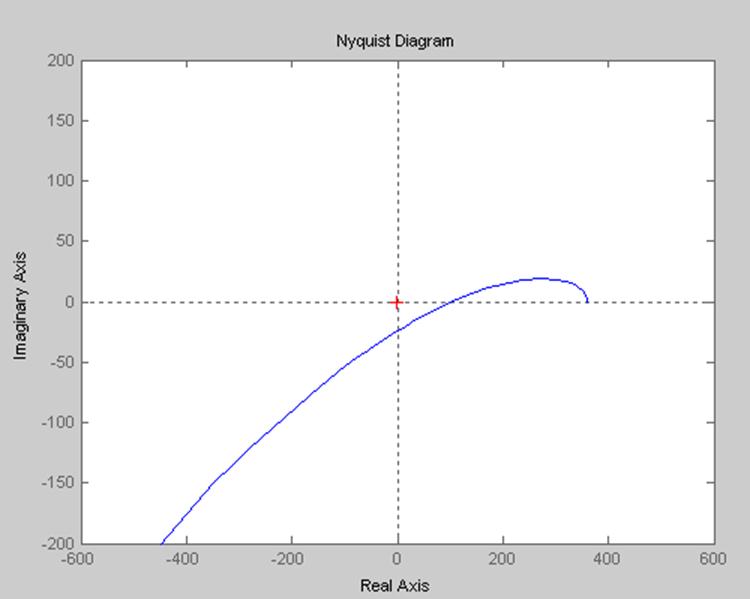
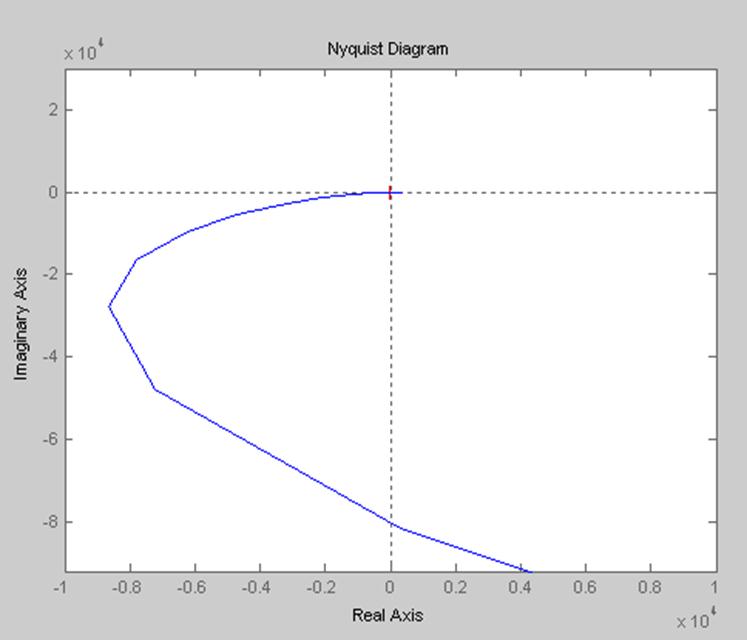
Рис.2.4
Система неустойчива, так как годограф Михайлова, при изменении частоты от 0 до +∞, повернулся по часовой стрелке.
2.4.Анализ логарифмических частотных характеристик.
На рис.2.5 изображены логарифмическая амплитудная характеристика (ЛАХ) и логарифмическая фазная характеристика (ЛЧХ), полученные с помощью Matlab.
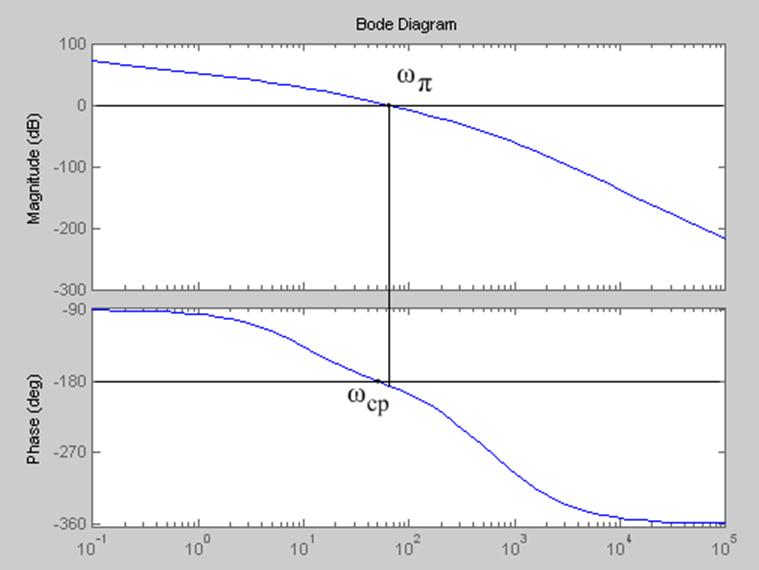
Рис.2.5
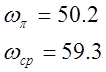
По рис.2.5 можно определить ωπ и ωср.
Система неустойчива, так как ![]() .
.
3.Анализ качества нескорректированной САУ.
Переходные характеристики замкнутой системы (рис.1.10) расходятся, что делает невозможным определение времени регулирования и перерегулирование, имеется характерные колебания.
Показатель колебательности μ – это отношение максимального значения мнимой части корней характеристического уравнения к соответствующей вещественной.
С помощью Matlab найдем корни характеристического уравнения замкнутой системы (рис.3.1)
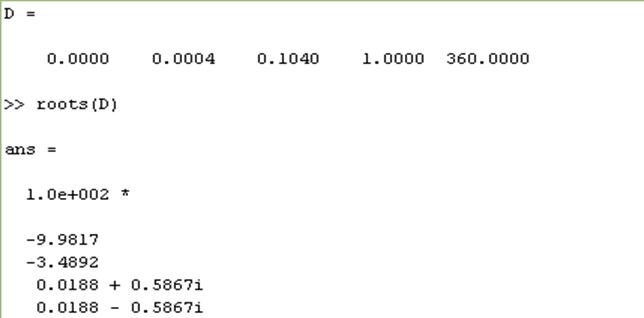
Рис.3.1
Корень с максимальным значением мнимой части:
Карта корней характеристического уравнения изображена на рис.3.2
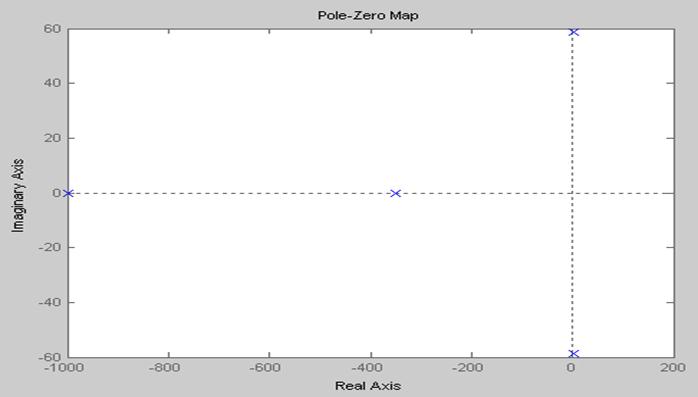
Рис.3.2
Частотные оценки. Запасы устойчивости.
ЛАХ и ЛЧХ нескорректированной САУ (рис.3.3)
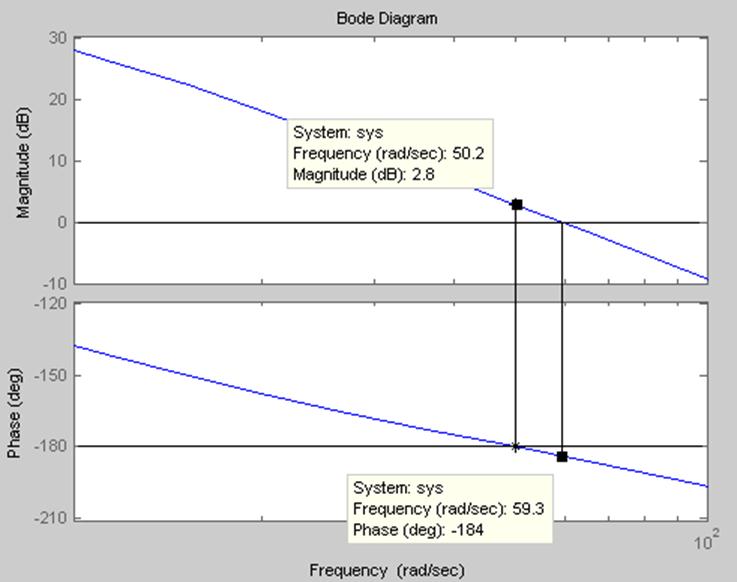
Рис.3.3
Система имеет отрицательные запасы устойчивости.
4.Синтез корректирующего устройства.
4.1.Синтез корректирующего устройства методом Соколова.
На первом этапе определяется разность порядков полиномов знаменателя (n1) и числителя (m1) передаточной функции замкнутой нескорректированной системы
(n1-m1).
n1-m1=4-0=4
ν=1
На втором этапе формируется желаемая передаточная функция замкнутой системы, удовлетворяющая заданным требованиям к качеству синтезируемой системы на основе нормированных передаточных функций.
Требования к синтезируемой системе:
sзад=20 %;
![]() =0,25, с
=0,25, с
При формировании желаемой передаточной функции
 степени m и n соответственно
полиномов B(S) и A(S) выбирают,
степени m и n соответственно
полиномов B(S) и A(S) выбирают,
исходя из следующих соотношений:
m=ν-1=1-1=0,
n=(n1-m1)+ν-l=4+1-1=4,
Нормированная передаточная функция Фн(р) будет иметь те же порядки n и m. Коэффициенты этой функции определяют из соответствующей Таблицы А.1 Приложение. Минимальное время регулирования в приложении.


По переходной характеристике нормированной функции (рис.4.1) определяют время переходного процесса τн.
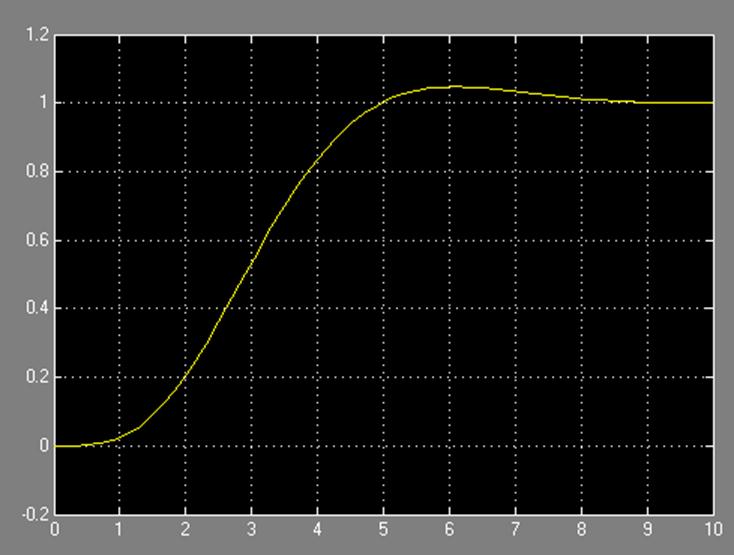
Рис.4.1
τн=4.58 c.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.