Характеристики снимаются для трех значений Р324 и тех же скоростей, что и в п.3. Для других параметров установить: Р320 = OFF; Р321 = Р322 = 0. Записываются переменные: скорость n (H474 LOW), момент M (H475 LOW), ток статора I (Output current); частота напряжения статора f (Actual frequency). Строятся сводные графики скорости и частоты.
Как и в предыдущем пункте, вторая задача – определить условия работы компенсации скольжения, т.е. зависимость начала работы от тока обмотки статора Iнач.
Для обоснованного назначения Р324 необходимо располагать информацией о коэффициенте обратной связи Кf = Δf /ΔI, который рассчитывается аналогично Кi для семейства кривых f(М) и I(М), снятых при одном из заданных значений частоты и трех значениях параметра Р324. Затем определяется удельный коэффициент Кf 0 = Кf /Р324. Добавка по частоте Δf для определенного диапазона изменения нагрузки ΔI при любом значении параметра Р324: Δf = Кf 0 × Р324 × ΔI.
5. Характеристики привода при использовании обеих компенсаций.
Исследования, выполненные в п.3 и 4, необходимы для оценки действия обеих компенсаций в отдельности. Для практического же использования механические характеристики с одной компенсацией не пригодны из-за недостаточных момента или жесткости. Наиболее рациональным и потому обязательным является одновременное использование обеих компенсаций. Варьируя коэффициентами обеих обратных связей, можно сформировать механические характеристики, удовлетворяющие требованиям технологического процесса.
Для сравнительной оценки результатов характеристики снимаются для тех же скоростей, что и в п.3, и наибольших из заданных значений Р322 и Р324. Для других параметров: Р320 = OFF; Р321 = 0. Записываются переменные: скорость n (H474 LOW), момент M (H475 LOW), напряжение U (SEW2); частота напряжения статора f (Actual frequency). Строятся сводные графики отдельно для одной из переменных (скорости, напряжения и частоты).
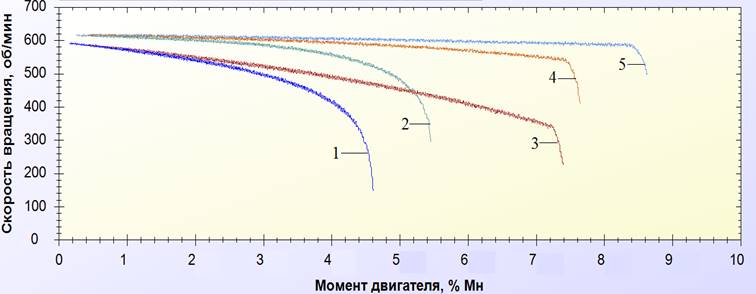
На рис.5 в качестве примера показан сводный график экспериментально снятых механических характеристик с различными значениями степени компенсации: 1 – без компенсаций; 2 – с компенсацией скольжения; 3 – с IR – компенсацией; 4 – с IR – компенсацией и компенсацией скольжения; 5 – то же, но с большей IR – компенсацией.
 Сводные
графики могут быть построены для различных сочетаний скоростей, вида и степеней
компенсации.
Сводные
графики могут быть построены для различных сочетаний скоростей, вида и степеней
компенсации.
Рис.5. Сводный график механических характеристик.
6. Характеристики привода при автоматической настройке компенсаций.
В преобразователях частоты предусмотрена функция автоматической настройки компенсаций. Она полезна в большинстве случаев практического использования и наладки электроприводов с преобразователями частоты при отсутствии информации о сопротивлениях обмоток двигателя и коэффициентах обратных связей преобразователей. Использование функции автоматической настройки компенсаций очень удобно при наладке привода, т.к. она задает близкие к оптимальным настройки преобразователя, и при дальнейшей наладке может потребоваться только их корректировка. Она совершенно необходима при недостаточной квалификации или отсутствии опыта оператора.
Задание функции производится назначением параметра Р320 = ON при неработающем двигателе, а ее активизация только при пуске двигателя. На интервале предварительного намагничивания, длительность которого задается параметром Р323, на обмотки статора подается напряжение постоянного тока и преобразователь автоматически измеряет величину активного сопротивления обмотки статора, вычисляет необходимые значения параметров Р321 и Р322 и устанавливает их. Вычисления производятся с учетом угла наклона базовой характеристики. Таким образом, формируется магнитный поток двигателя, т.е. момент двигателя. Автоматическая установка компенсации скольжения не предусмотрена, т.к. необходимая жесткость механической характеристики определяется конкретными требованиями. В работе следует задать Р324 = 120 об/мин, равное частоте номинального скольжения двигателя Δnном.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.