Подготовка проводится по программе, изложенной в Главе 3: загрузка программного обеспечения «MT-MENAGER»; дополнительных программ «Настройки преобразователя нагрузочной машины» и «Настройки преобразователя асинхронного двигателя»; ввод в эксплуатацию преобразователя асинхронного двигателя для режима U/f без датчика скорости и установка его параметров. Для параметров Р16_/17_ устанавливаются значения скоростей, указанные в задании. Максимальную скорость (Р302) задать равной номинальной. Параметры компенсаций Р32_ для каждого конкретного случая устанавливаются согласно заданию.
2. Характеристики привода при работе без компенсаций.
Установить следующие значения параметров: Р320 = OFF; Р321 = Р322 = Р324 = 0.
Производится пуск двигателя (DI 04), запускается программа линейного увеличения нагрузки (DI 05) и для каждой скорости осциллографируются переменные: момент M (H475 LOW); скорость n (H474 LOW); ток статора I (Output current); частота напряжения статора f (Actual frequency). Производится обработка осциллограмм и строятся сводные графики скорости (Рис.2) и тока (Рис.3).
На осциллограммах по кривой частоты определяется, сработала ли защита от перегрузок по току: после ее срабатывании начинается уменьшение частоты. Если этого не произошло, то снятая осциллограмма соответствует рабочему участку механической характеристики. Из-за недостаточной жесткости механических характеристик при увеличении нагрузки скорость снижается вплоть до нуля. При уменьшении частоты рабочим следует считать только участок до срабатывания защиты. Сравнить значение тока в этот момент с предельным значением тока, заданным в параметре Р303.
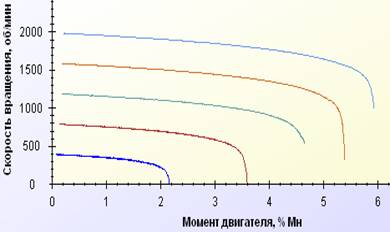
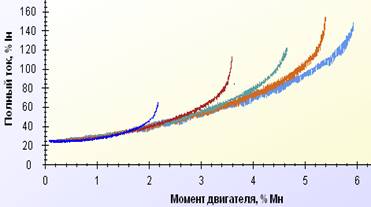
Рис.2. Сводный график кривых скорости. Рис.3. Сводный график кривых тока статора.
3. Характеристики привода при использовании I×R – компенсации.
Функция I×R – компенсации используется для компенсации падения напряжения, создаваемого током на сопротивлении обмотки статора и возрастающего при увеличении нагрузки. Оно влечет за собой уменьшение магнитного потока и, как следствие, момента двигателя. Таким образом, основная задача I×R – компенсации состоит в увеличении максимального момента Ммакс до требуемой величины во всем заданном диапазоне регулирования скорости. При этом ток не должен превышать предельного значения, установленного параметром Р303, при котором вступает в действие защита по току.
Задачи исследований: 1) определить степень влияния I×R – компенсации и способов увеличения момента; 2) определить начало и диапазон действия I×R – компенсации.
1) Функция I×R – компенсации состоит в создании дополнительного напряжения ΔU, изменяющегося пропорционально току статора. По существу – это положительная обратная связь по току, действующая по каналу напряжения. ΔU суммируется с напряжением U10, определяемым базовой характеристикой для: U1 = U10 +ΔU.
Коэффициент обратной связи, устанавливающий величину дополнительного напряжения в функции тока, задается параметром Р322 в виде процента от номинального тока преобразователя. В зависимости от его выбора можно достичь полной, недо - или перекомпенсации падения напряжения на обмотках статора.
Такой способ задания не предоставляет информации о фактической величине ΔU и не позволяет судить о степени компенсации. Поэтому настройка I×R – компенсации должна производиться методом подбора или заданием режима автоматической настройки, имеющегося в Меню преобразователя. Если бы было известно значение ΔU, то назначение параметра Р322 стало бы более обоснованным. При необходимости можно определить зависимость ΔU от Р322, т.е. коэффициент обратной связи.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.