Методика расчета удельного коэффициента обратной связи. Используя семейство зависимостей U(М) и I (М), снятых при одном из заданных значений частоты, но при различных значениях параметра Р322, для каждого из них рассчитывается коэффициент обратной связи Кi = ΔU/ΔI, опрделяя ΔU и ΔI при одинаковых значениях М1 и М2. Затем определяется усредненный удельный коэффициент Кi0 = Кi /Р322, с помощью которого можно рассчитать дополнительное напряжение ΔU для заданного диапазона изменения нагрузки ΔI при любом значении Р322: ΔU = Кi0 ×Р322 ×ΔI. Проделав подобные операции для нескольких частот, можно сделать вывод о зависимости (или независимости) Кi0 от частоты питающего напряжения.
Опыты проводятся поочередно для каждого из заданных значений параметра Р322 и заданных значений скорости. Для других параметров: Р320 = OFF; Р321 = Р324 = 0.
Записываются переменные: момент M (H475 LOW), скорость n (H474 LOW), ток статора I (Output current); напряжение U (SEW2). Строятся сводные графики скорости и тока, аналогичные рис.2, рис.3, и дополнительно – график напряжения. Набор кривых и количество сводных графиков задаются преподавателем. Рассчитываются и оцениваются коэффициенты Кi0.
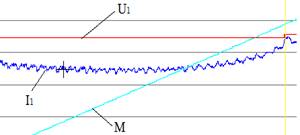
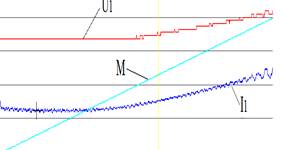
2) Знание начала действия I×R – компенсации необходимо для того, чтобы выявить условия ее работы. Момент вступления в действие определяется по графику напряжения: на осциллограмме ему соответствует значение тока двигателя, при котором начинается рост напряжения. Кривая напряжения представляет собой ступенчатую кривую с шагом ΔU = 1 В. На рис.4 представлены осциллограммы, снятые при различных скоростях, из которых видно, что рост напряжения начинается при разных значениях тока и момента.
а) б)
Рис.4. Осциллограммы кривых U1, I1, М при действии I×R – компенсации.
Необходимо определить значение скорости, ниже которой напряжение не начинает расти при любой нагрузке. Его и следует считать границей действия I×R – компенсации. При бóльших скоростях компенсация вступает в действие при меньших токах. На рис.4,а показана осциллограмма при частоте питания, на которой напряжение начинает расти только при скорости, близкой к нулю.
Построить зависимость тока Iнач, при котором начинается работа компенсации, от скорости: Iнач = f(n). Определить, меняется ли характер зависимости от значения Р322.
4. Характеристики привода при использовании компенсации скольжения.
Компенсация скольжения в системах частотного управления без датчика скорости используется в тех случаях, когда необходимо увеличить жесткость механической характеристики. Как и при I×R – компенсации, управление осуществляется в функции тока статора, несущего информацию о нагрузке, но в отличие от нее воздействие производится по каналу частоты. Это один из вариантов положительной обратной связи по нагрузке, известный из теории автоматического управления. При увеличении нагрузки за счет действия обратной связи увеличивается частота питающего напряжения, и скорость двигателя возрастает, причем тем больше, чем больше нагрузка, благодаря чему повышается жесткость механической характеристики. Изменение частоты автоматически сопровождается изменением напряжения в соответствии с базовой характеристикой, что является основой частотного регулирования. Однако напряжение возрастает незначительно, лишь компенсируя увеличение падение напряжения на индуктивном сопротивлении обмотки статора. Поэтому момент двигателя остается примерно таким же, как на характеристике без компенсаций.
Жесткость механической характеристики, достигаемая за счет действия этой обратной связи, зависит от коэффициента обратной связи, задаваемого параметром Р324 как частота скольжения в об/мин. Диапазон задания значений Р324 позволяет значительно увеличить жесткость характеристик. Основная опасность такого увеличения – потеря устойчивости, свойственная системам с положительными обратными связями. Обычно рекомендуется устанавливать частоту номинального скольжения двигателя, но фактичес-кое изменение частоты питания при такой настройке не известно. Для оценки степени влияния компенсации характеристики снимаются при нескольких значениях Р324.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.