Сзyz » , (17)
, (17)
при изгибах
Сзxz» , Сзxy»
, Сзxy»  . (18)
. (18)
Значение численного коэффициента в двух последних формулах зависит от схемы нагружения балки. Так, при изгибе балки моментом этот коэффициент равен 2, перерезывающей силой - 3. Различные комбинированные варианты дают промежуточные значения.
Итак, пара независимых параметров R, Fo (или а , b) определяет четыре коэффициента жесткости несущей конструкции звена, что снижает размерность задачи оптимизации. Результатом синтеза жесткости с использованием идеализированной конструкции является определение параметров R , Fo , значений осевых моментов инерции сечений Jxo = R2Fo ; Jyo = Jzo = 0,5 R2Fo , a также коэффициентов жесткости звена.
Реальная конфигурация профиля поперечного сечения может отличаться от рассмотренных. Тогда параметры сечения выбранного профиля могут быть подобраны из условий:
Jx ³ Jxo ; Jy ³ Jyo ; Jz ³ Jzo. (19)
но удобнее для этой цели пользоваться коэффициентами унификации характеристик конструкции. Под коэффициентом унификации определенной характеристики конструкции понимают отношение значения этой характеристики для реальной конструкции к значению соответствующей характеристики идеализированной конструкции. Для произвольной балки можно указать три таких коэффициента:
Kx = Jx / Jxo ; Ky = Jy / Jyo ; Kz = Jz / Jzo .(20)
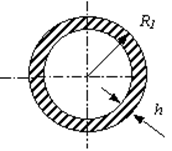
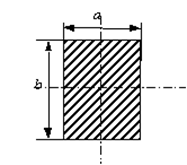
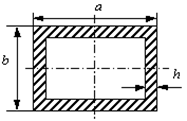
Выражения этих коэффициентов через параметры реальной и идеализированной конструкций для ряда возможных профилей приведены в табл.1.
|
Профиль сечения балки |
Kx |
Ky |
Kz |
|
F=2pR1h
h<<R |
R12/R2 |
R12/R2 |
R12/R2 |
|
F=ab
|
|
a2/6R2 |
b2/6R2 |
|
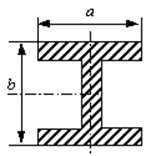
F=2(a+b)h
|
|
|
|
|
F=(2a+b)h
h<<b h<<a |
|
|
|
|
F=pR12
|
0,5 R12/R2 |
0,5 R12/R2 |
0,5 R12/R2 |
При оценке массы и коэффициентов жесткости механической передачи исходим из предположения, что тип редуктора известен. Масса редуктора в первую очередь определяется такими факторами, как коэффициент редукции i и максимальный передаваемый момент, приведенный к валу звена:
тp = f (M, i) . (21)
Такого рода зависимость следует получать эмпирическим путем посредством обработки статистических данных для редукторов рассматриваемого типа. При обработке статистических данных можно предположить прямую пропорциональность между массой редуктора и передаваемым моментом, а также прямую зависимость массы от числа ступеней редукции, которое приближенно можно оценить как k' ln i . Таким образом, представляется удобным аппроксимировать статистические данные зависимостью вида:
тp = k М lп i = kpМ , (21а)
где kp= k ln i ; k – коэффициент аппроксимации.
Жесткость механической передачи можно в первом приближении считать пропорциональной его массе, то есть полагать
Сp = lpМ . (22)
Распределение массы редуктора по звену (звеньям) МС зависит как от компоновочно-кинематической схемы, так и от типа редуктора. Однако, при распределении масс следует руководствоваться наиболее простыми рабочими гипотезами.
Массу двигателя следует также искать в прямой зависимости от максимального нагрузочного момента,что при приведении к валу двигателя дает
mд=kд i M, (23)
где kд определяется для заданного тина двигателя на основе обработки статистических данных, получаемых из справочников. Массы датчиков положения и скорости от величины М можно считать не зависящими: эти элементы выбираются из кинематических характеристик и соображений не механического плана.
Коэффициент жесткости механической передачи Cp вносит вклад в ту составляющую жесткости, за которую отвечает кинематическая пара соответствующей степени подвижности: это Cpxx, Cpyy, Cpzz при поступательных парах, Cpyz при ротации, Cpxz, Cpxy – при вращательных парах.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.

 h<<b
h<<a
h<<b
h<<a