3. Кинематические погрешности δφj, вызванные неточностью изготовления и сборки передаточных механизмов приводов.
4. Мертвый ход Jφj , обусловленный наличием зазоров в передаточных механизмах.
Эти два вида ошибок зависят от вида передаточных механизмов.
5. Большое влияние на выходную точность исполнительного устройства оказывают зазоры (люфты) Δq'''j в кинематических парах исполнительного механизма. Они вносят дополнительные малые подвижности в систему, сообщают ей двигательную избыточность. При наличии нескольких кинематических пар движение исполнительного устройства может сопровождаться "разрывами" и последующими соударениями в кинематических парах, что значительно усложняет учет влияния зазоров на величину погрешности перемещения рабочего органа.
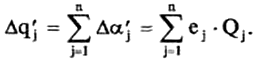
Погрешность обобщенной координаты - разность между ее действительным qjд и расчетным qjp значениями:
![]()
По величине она равна сумме указанных погрешностей (рис.2):
![]() (1)
(1)
Определим составляющие погрешности обобщенной координаты.
Погрешность ввода обобщенной координаты, вызванная погрешностью работы системы управления двигателей, может быть определена в виде:
 (2)
(2)
где ij - передаточное отношения от j - го двигателя к j - му функциональному звену; Δφдвj - погрешность угла поворота вала j - го двигателя. Приближенно ее можно принять равной Δφдвj =5...10 угловых минут (...').
Более подробно определение погрешности угла поворота вала двигателя рассматривают в литературе, посвященной проектированию систем управления роботов.
Звенья передаточных механизмов приводов исполнительного устройства ПР не являются абсолютно жесткими. Под действием нагрузок они деформируются. Это приводит к изменению положения функциональных звеньев, т.е. возникновению погрешностей обобщенных координат.
Рассмотрим j-й привод исполнительного устройства (рис.3), состоящий из двигателя Mj, передаточного механизма ПMj, имеющего податливость ej, и j-гo функционального звена.
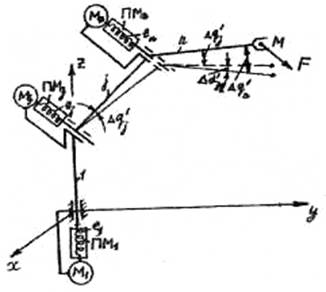
Рис.3
От действия внешней силы F в j-й степени подвижности возникает обобщенная сила:
 (3)
(3)
Она вызывает деформацию передаточного механизма j -го привода:
![]()
что приводит к появлению погрешности j-й обобщенной координаты:
 (4)
(4)
При нагружении исполнительного устройства силой F функциональные звенья упруго деформируются. На рис.4 положение недеформированного исполнительного устройства изображено сплошной основной линией, деформированного -штриховой линией.
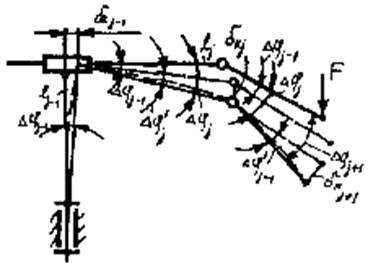
Рис.4
Ввиду малой кривизны изгиба продольной оси звеньев их можно условно заменить прямолинейными осями (сплошная тонкая линия). Угол Δφ'j между начальным (штрих пунктирная линия) и конечным положениями j-го функционального звена представляет собой его угловую деформацию.
Тогда величина погрешности Δφj j-й обобщенной координаты равна, рад:
 (5)
(5)
где δkj - линейная деформация (перемещение конечной точки) j-ro звена; lj - длина j-го звена.
При эксплуатации промышленного робота ввиду наличия первичных ошибок и погрешностей обобщенных координат отработка заданной функции положения рабочего органа осуществляется с некоторой погрешностью.
Запишем функцию положения рабочего органа теоретической схемы исполнительного устройства, состоящего из m функциональных звеньев и n степеней подвижности (рис.5) при наличии первичных ошибок и погрешностей обобщенных координат:
![]() (6)
(6)
где rс - радиус-вектор центра С рабочего органа теоретической схемы ИУ, мм; li - длина i-гo звена, мм; qj - обобщенная координата j-й степени подвижности, град.
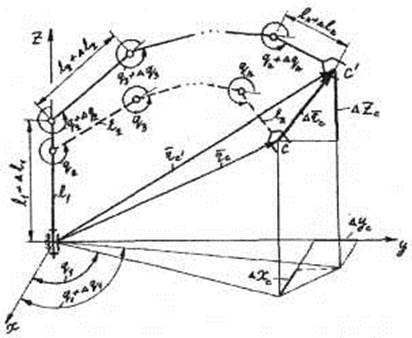
Рис.5
Функция положения рабочего органа реального исполнительного устройства:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.