Эти координаты элементов робота и оборудования получены в единой системе координат ХрYрZp , что позволяет их сравнивать и определить отсутствие соударения.
В процессе проектирования участка РТК с одним роботом определяют организацию промежуточного хранения, состав переходов робота при обслуживании оборудования, порядок расположения оборудования, состав и протяженность участков местных траекторий манипулирования.
Следующий этап проектирования – определение скоростей v перемещения схвата робота по этим траекториям. Скорости манипулирования выбирают из условия обеспечения требуемого такта выпуска изделий с участка и всего РТК в целом:
 (1)
(1)
где j – номер оборудования; w – номер перехода; tjw – длительность выполнения роботом переходов.
Определить скорости манипулирования можно в такой последовательности:
1. Группировка переходов и длительностей их выполнения tjw по исполнительным механизмам. При этом выражение (1) представляется в виде
 (2)
(2)
где tсхjw – длительность срабатываний схватов (ее значения могут быть получены на основе анализа работы существующих моделей роботов);
lijw и tijw – соответственно протяженность jw-го участка траектории и длительность перемещения по нему с помощью i-й степени подвижности робота. Например, перемещение по участкам траектории lijw=1 совершается степенью подвижности передвижения руки робота от одного оборудования к другому; lijw=2 – подъемом руки; lijw=3 – выдвижением руки и т. д.;
vi – скорость движения, обеспечиваемая i-й степенью подвижности. Точнее, это ее усредненное значение, так как фактическая скорость движения степени подвижности зависит от большого количества факторов: значения хода, нагрузки, конфигурации манипулятора, фазы движения (разгона, установившегося движения, торможения).
2. Распределение скоростей между степенями подвижности робота. Скорость движения степеней подвижности можно представить в виде
![]() (3)
(3)
где ai – коэффициенты распределения скоростей по степеням подвижности робота;
 (4)
(4)
— средняя скорость движения по всем степеням подвижности робота; i*—общее число степеней подвижности робота.
Из (3) и (4) следует, что ![]() .
Значения коэффициентов ai могут быть определены на основании
анализа динамических характеристик существующих роботов. При этом целесообразно
учитывать их зависимость от вида общей компоновки робота, значений перемещений,
грузоподъемности, точности и т.п.
.
Значения коэффициентов ai могут быть определены на основании
анализа динамических характеристик существующих роботов. При этом целесообразно
учитывать их зависимость от вида общей компоновки робота, значений перемещений,
грузоподъемности, точности и т.п.
3. Определение скоростей движения робота. Сначала определяется средняя скорость vср. Подставим (3) в (2):
откуда
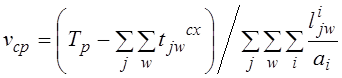 (5)
(5)
Тогда искомые скорости движения степеней подвижности vi находят подстановкой средней скорости в выражение (3). Найденные скорости движения степеней подвижности робота должны быть не больше реально достижимых. Если это условие не выполняется, то приходится переходить к более сложным компоновкам робота или системам ПХ. Если никакие варианты компоновки робота и системы промежуточного хранения не могут снизить скорости до допустимого уровня, то следует изменить состав участка РТК. С этой целью, прежде всего, перераспределяют оборудование между роботами p. Рассматривают варианты уменьшения протяженности траекторий манипулирования в пределах участков РТК за счет введения устройства вспомогательного транспортирования изделий между роботами (коррекция Mn). Наконец, если и эти резервы снижения скорости исчерпаны, ставится вопрос об увеличении количества роботов R.
Осуществляя коррекции р, Мп (место передачи изделий между роботами) и R, необходимо иметь в виду, что они затрагивают весь РТК в целом и поэтому могут проводиться только после совместного предварительного проектирования всех участков РТК, обслуживаемых отдельными роботами.
Коррекцию p и Mn целесообразно производить также для более равномерного распределения скоростей движения различных роботов в том случае, если эти скорости не превышают максимально допустимых.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.