Плавное наведение осуществляется, когда изображение цели находится в пределах области обзора. В этом режиме проводится поиск, распознавание цели и слежение за подвижными объектами. Управление плавным наведением осуществляется через кору головного мозга. Угловая скорость наведения зависит от расстояния изображения цели от оптической оси глаза: чем оно больше, тем выше угловая скорость поворота глаз. Когда изображение выходит за пределы области обзора, зрительный анализатор прекращает свою работу в режиме плавного наведения. Поэтому максимальная скорость слежения за движущейся целью ограничена и не превышает 30 град/с.
Скачкообразное наведение оптических осей глаз на цель осуществляется при обнаружении изображения цели в области захвата. Скачки обеспечивают быстрое (со скоростью порядка 450 град/с) перемещение изображения цели в центр сетчатки. Скачкообразным наведением командует средний мозг. Наличие в области захвата двух видов фотоэлементов с разными передаточными свойствами позволяет создать в контуре управления форсирующие звенья и компенсировать динамические ошибки. Вследствие этого его быстродействие составляет 0,07 с, тогда как контур плавного наведения срабатывает за 0,17 с.
Вестибулярный анализатор реализует инерциальные методы измерений. Он включает два одинаковых вестибулярных аппарата (левый и правый) и нейронные ядра и узлы, где осуществляется первичная обработка информации. Вестибулярные аппараты разнесены на некоторую базу, повернуты зеркально-симметрично относительно друг друга и располагаются в одной плоскости и соосно со зрительными аппаратами.
Вестибулярный аппарат человека весит около 1г и имеет объем менее 1см3. Он представляет собой тонкостенную замкнутую полость, заполненную жидкостью и подвешенную посредством соединительных перемычек в костном футляре. В щели между костным футляром и стенкой вестибулярного аппарата также содержится жидкость, которая как гидравлический демпфер защищает его от шумов и вибраций. Вестибулярная полость имеет форму сложного лабиринта, внутри которого располагаются инерциальные биодатчики. Каждый из них имеет свою отдельную камеру, отделенную от других регулируемыми клапанами.
В состав вестибулярного аппарата входят три вида инерциальных датчиков.
Вестибулярный измеритель угловых ускорений
представляет собой (см. рис. 4.4, а) полый канал 1, имеющий форму 2/3 кольца
заполненный жидкостью. Роль инерционного тела, реагирующего на угловое
ускорение ![]() , выполняет масса кольца жидкости
2. При вращении головы вокруг оси, перпендикулярной плоскости канала, жидкость
стремиться сохранить свое первоначальное положение, что вызывает ее движение в
канале. Измерение движения жидкости осуществляется в ампуле 3, где
располагается студенистая заслонка 5, закрепленная на упругих волосках.
Движение жидкости вызывает отклонение заслонки от нейтрального положения.
Рецепторные клетки 4 преобразуют угол поворота заслонки в эквивалентный сигнал
и передают его по нервным каналам 6 в отделы мозга для последующей обработки. а) б) в)
, выполняет масса кольца жидкости
2. При вращении головы вокруг оси, перпендикулярной плоскости канала, жидкость
стремиться сохранить свое первоначальное положение, что вызывает ее движение в
канале. Измерение движения жидкости осуществляется в ампуле 3, где
располагается студенистая заслонка 5, закрепленная на упругих волосках.
Движение жидкости вызывает отклонение заслонки от нейтрального положения.
Рецепторные клетки 4 преобразуют угол поворота заслонки в эквивалентный сигнал
и передают его по нервным каналам 6 в отделы мозга для последующей обработки. а) б) в)
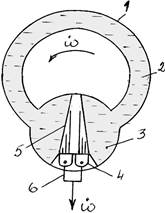


Рисунок 4.4 – Вестибулярные биодатчики человека
а) измеритель углового ускорения; б) измеритель линейного ускорения;
в) многофункциональный измеритель.
В каждом вестибулярном аппарате имеется три датчика угловых ускорений. Их измерительные оси ориентируются взаимно перпендикулярно друг другу, что обеспечивает измерение полного вектора углового ускорения головы.
Измеритель линейного ускорения.
Чувствительным элементом этого датчика (см. рис. 4.4, б) является пластина 1,
состоящая из тяжелых прочно склеенных кристаллов – отолитов. Она лежит в
горизонтальной плоскости на студенистой прослойке 2, которая может легко
скользить по основанию. Между пластиной и основанием имеется упругая связь,
осуществляемая с помощью волосков, выходящих из рецепторных клеток 3. При ускоренных
линейных движениях головы отолитовая пластина смещается от своего нейтрального
положения, и на выходе рецепторных клеток возникают сигналы, пропорциональные
этому смещению. Измерительные оси рецепторов датчика имеют веерообразное
расположение, вследствие чего он измеряет горизонтальную составляющую ![]() линейного ускорения.
линейного ускорения.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.