По команде APPRO подход может быть осуществлен под любым требуемым углом. Методы языка ВАЛ для истолкования вопроса о желаемом угле подхода заключаются в точном согласовании ориентации инструмента, в котором он находился при определении положения на стадии обучения, с командой HERE, подаваемой с клавиатуры. Фактически угол подхода к позиции Л можно изменить по сравнению с углом подхода к позиции В, просто изменив ориентацию инструмента во время позиционирования в режиме обучения по команде HERE В. После этого, сколько бы раз ни выполнялась программа BETTER.А.ТО.В, требуемая ориентация захвата при подходе сохранится.
Программа BETTER .А.ТО. В более совершенна, но ее использование в условиях реального производства не решает всех проблем. Успех применения программы зависит от выполнения довольно жестких требований, предъявляемых роботом к рабочему месту, которое он обслуживает. Предполагается, что каждый раз, когда робот возвращается в точку А, в точно установленном месте находится предмет, готовый к переноске. Кроме того, каждый раз, когда робот перемещается в позицию В, предполагается, что там имеется свободное место для помещения нового предмета. Таким образом, совместно с роботом, управляемым по программе BETTER.А.ТО.В должен работать оператор или надежная автоматизированная система, в противном случае комплекс функционировать не будет.
Программы на языке ВАЛ будут выполняться столько раз, сколько указано в команде EXECUTE. Если таких указаний нет, программа будет выполнена один раз. На производстве чаще всего требуется, чтобы программа робота повторялась непрерывно до тех пор, пока ее не остановят командой ABORT. Чтобы обеспечить непрерывное выполнение программы, оператору следует всего лишь набрать вместо числа повторений любое отрицательное число. Поскольку отрицательное число повторений совершенно не имеет смысла, установлено, что оно воспринимается системой управления как команда на непрерывное повторение программы. После выполнения последней команды программное обеспечение просто возвращает систему управления к первой команде, не сбивая ритма.
В любом месте программы скорость ее отработки может быть изменена командой SPEED (сокращенно SP) с клавиатуры. Принято, что целое число, набранное после слова SPEED, представляет собой в процентах долю изменения стандартной скорости в диапазоне от 0 до 327 %. Это полезно в том случае, когда сначала надо снизить скорость для отладки программы, а затем, при исполнении ее, снова увеличить. Когда ABORT или просто А, набранная с клавиатуры терминала, прекращает выполнение программы (выполнение текущего шага), как только нажатие клавиши введет букву А. Кроме того, имеется кнопка экстренного отключения питания руки робота (ЕРО).
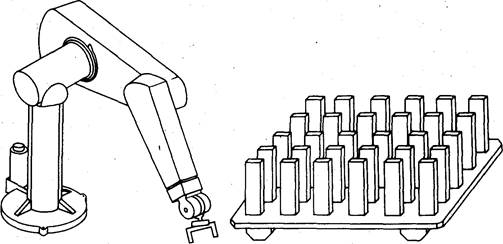
Рис. 7.9
Поддон может быть целиком загружен или разгружен роботом, использующим программные циклы
Используя возможности языка ВАЛ, можно применить программные циклы, заставляющие робот каждый раз слегка изменять положение позиции А с тем, чтобы постепенно разгрузить весь поддон изделий вместо того, чтобы каждый раз забирать изделие с одного и того же места. Предположим, что имеется поддон с 30 изделиями, установленными так, как показано на рис. 7.9. Обратите внимание, что изделия расставлены в пять рядов и шесть колонок. В зависимости от габаритов деталей и типа робота для манипулирования с ними вместо поддона может быть транспортная палета или лоток на конвейере.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.