Программа А.ТО.В. (наименование программы) OPEN (открыть захват робота) MOVE А (переместить захват робота в определенную позицию А)
CLOSEI (закрыть захват робота немедленно) MOVEB (переместить захват в определенную позицию В)
Это работоспособная программа на языке ВАЛ, хотя, как мы скоро обнаружим, и не очень хорошо составленная. Первым очевидным несоответствием кажется использование команды OPEN, чтобы открыть захват, и команды CLOSEI, чтобы закрыть его немедленно. Действительно, мы могли бы подать команду OPENI, чтобы немедленно открыть захват. Команда OPEN без добавленного I предписывает роботу начать открывать захват во время выполнения следующей команды. При условии, что до позиции А достаточно далеко, не будет большого вреда позволить роботу открыть захват во время перемещения к этой позиции. Важно, однако, закрыть захват на предмете до выполнения команды MOVEB, иначе он уйдет, не захватив предмет. Поэтому здесь и использована команда CLOSEI, предписывающая немедленно, т. е. до выполнения команды MOVEB, закрыть захват.
Однако, как уже говорилось, программа А.ТО. В не из лучших. Получив команду MOVE, робот двигается непосредственно к пункту назначения, используя свои способности перемещения по осям координат. Проделанный путь не обязательно будет прямым, но он обязательно приведет непосредственно к захватываемому предмету. Представьте себе, как рука робота движется прямо к месту, где находится этот предмет. В подавляющем большинстве случаев рука робота собьет предмет вместо того, чтобы захватить его. Кроме того, во время перемещения руки к позиции В перемещение происходит прямолинейно, и, если позиции А и В находятся на поверхности стола, рука будет скрести по ней, вместо того, чтобы захватить что-нибудь! Наконец, программа заканчивается, когда зажатый в захват предмет находится над позицией В, куда робот должен был этот предмет поместить.
Усовершенствуем программу А.ТО.В. Можно было изменить старую программу в режиме редактирования EDIT, сохранив наименование А. ТО. В, однако лучше дать измененному варианту новое наименование, что облегчит распознавание вариантов.
BETTER.А.ТО.В (наименование новой усовершенствованной программы)
OPEN
APPRO A, 25 (подойти к позиции А на расстояние 25 мм)
MOVE A
CLOSEI
DEPART 25 (отойти от А на 25 мм)
APPRO В, 25 (подойти к позиции В на расстояние 25 мм)
MOVE В
OPENI
DEPART 25 (отойти от В на 25 мм)
Эта программа решает проблемы, не решенные программой А.ТО. В. Команда APPRO заставляет руку робота зависнуть непосредственно над заданной точкой, вместо того чтобы прямо прийти в нее. Выражение «зависнуть» является неточным, поскольку предмет может быть прикреплен к вертикальной стене
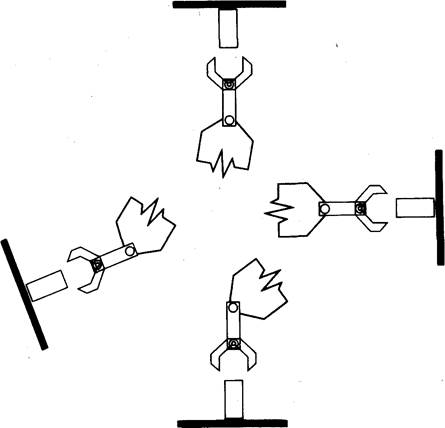
Рис. 7.8
Различные положения захвата в зависимости от описания позиции А
и даже к потолку. На рис. 7.8 показаны различные возможные положения, в которых робот может осуществить захват в зависимости от описания позиции А. Обратите внимание, что вне зависимости от расположения поверхности, с которой берется предмет, и угла, под которым двигается рука робота, захват самостоятельно устанавливается так, чтобы подход к предмету осуществился правильно за счет непосредственного смещения по оси Z в системе координат инструмента. Читатель может снова обратиться к рис. 7.3, чтобы вспомнить, что такое ось Z в этой системе координат. Когда программист пользуется командой APPRO, программное обеспечение языка ВАЛ автоматически выполняет необходимый перерасчет осей, чтобы правильное направление подхода совпадало с осью Z захвата. Эта команда удобна не только для захвата предметов, которые необходимо перенести, но и для управления автоматическими винтовертами и другими инструментами, которые могут быть закреплены на руке робота.
Предположим, что требуется подходить к захватываемому предмету в направлении, отличном от перпендикулярного к поверхности стола, как это показано на примере на рис. 7.8. Эффективным направлением подхода для осуществления захвата некоторых предметов может быть направление сбоку, а не сверху.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.