Помимо способности обрабатывать только те данные, которые относятся к дискретным моментам времени, компьютер имеет дело со словами ограниченной длины. Поэтому он может воспринимать величину сигнала лишь с конечным разрешением. Компьютер является устройством, для которого не только время является дискретным, но и величина также является квантованной. Поэтому необходимо сделать так, чтобы значение входного сигнала изменялось только скачками конечной величины. Такое преобразование называют «квантованием по величине». Оно осуществляется аналого-цифровым преобразователем (см. также раздел 3.3.6). Таким образом, до того, как измерительный сигнал можно будет ввести в компьютер, необходимо получить выборки этого сигнала (дискретизировать его по времени) и их проквантовать (дискретизировать по величине). Сигнал такого типа, дискретизированный по времени и квантованный по величине, называют «цифровым сигналом».
Ниже мы увидим, что еще до взятия выборок аналоговый сигнал нужно отфильтровать, чтобы убрать высокочастотные составляющие (шума и искажений). В противном случае они приводили бы к ошибкам. Такая предварительная фильтрация является существенной частью системы сбора и распределения данных. При этом речь не идет о такой обработке сигнала, которая бывает нужна для усиления сигнала до определенной величины или придания ему оптимальной формы для последующего преобразования в системе сбора данных.
4.5 Системы сбора данных 293
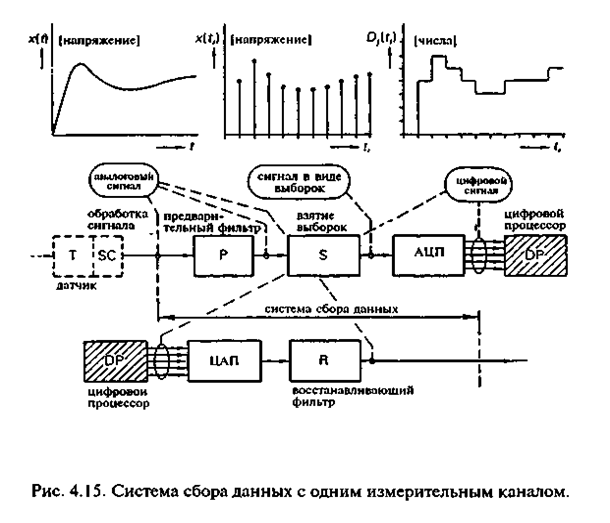
Последний из упомянутых типов воздействия на сигнал носит название «обработки сигнала». На рис. 4.15 показано, из каких частей состоит система сбора данных, а также указаны сигналы различного типа на входах и выходах отдельных узлов. Но для получения таких сигналов все же необходимо осуществить в системе сбора данных преобразование цифрового сигнала, поступающего от компьютера, в выходное напряжение или ток. Такое преобразование выполняется цифро-аналоговым преобразователем (см. раздел 3.3.6), который превращает двоичное слово Dj в пропорциональное ему напряжение или ток. В результате величина выходного напряжения или тока оказывается определенной только в дискретные моменты времени ti Чтобы вновь придти к аналоговому выходному сигналу применяется интерполяция. Процедуру интерполяции значений выходного сигнала между моментами ti называют «восстановлением». Обычно это осуществляется с помощью фильтра нижних частот, который в данном случае играет роль «восстанавливающего фильтра». На практике производительность цифрового компьютера часто так велика, что имеется возможность обрабатывать не один входной сигнал, а большее число таких сигналов, применяя временное мультиплексирование (см. параграф 2.2). В этом случае необходимо со стороны входа компьютера поместить «мультиплексор» или «опрашивающее устройство», а со стороны выхода компьютера — «демультиплексор» или «распределяющее устройство». Представленная на рис. 4.15 система является одноканальной системой сбора данных и поэтому не содержит узлов, осуществляющих мультиплексирование и демультиплексирование.
4.5.2 Оцифровывание
Как мы увидели выше, на входе процессора в системе сбора данных должен осуществляться перевод аналогового сигнала в цифровой вид, то есть сигнал должен быть преобразован таким образом, чтобы он стал дискретным по времени и квантованным по величине. Другими словами, аналоговый сигнал необходимо преобразовать в поток двоичных слов Dj, соответствующих моментам взятия выборок ti. Обычно эти слова поступают на вход процессора параллельно, то есть в виде одного полного слова на каждую выборку. При преобразовании аналогового сигнала в последовательность чисел вносятся ошибки и искажения. На рис. 4.16 показано возникновение этих ошибок во временной области и по величине для аналогового входного сигнала VA(t). Из-за погрешности Dt в моментах взятия выборок ti, возникает ошибка по величине DV, которая зависит от того, насколько «круто» изменяется сигнал VA(t). По мере роста высокочастотных компонент в сигнале VA(t) эти ошибки становятся все больше. Если бы этих ошибок не было вовсе, то аналоговый эквивалент двоичного сигнала D выглядел бы как VA на рис. 4.16. В действительности, VA меняется в пределах полосы, ограниченной на рис. 4.16 штриховыми линиями.
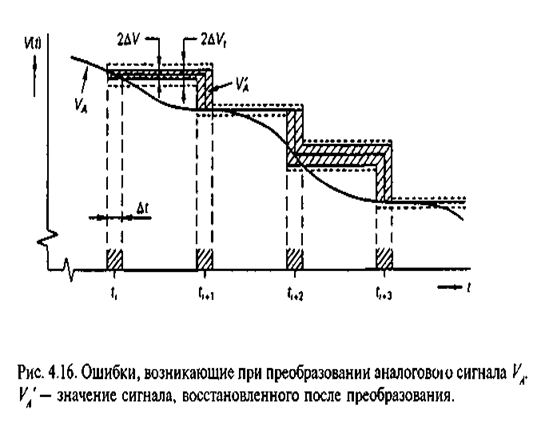
Таким образом, ошибка ![]() равна:
равна:
![]()
Эта (полная) ошибка ![]() больше,
чем
больше,
чем ![]() , и определяется ошибками квантования,
погрешностями аналого-цифрового преобразования и ошибками, возникающими при
взятии выборок, вдобавок к погрешностям в задании точек дискретизации на оси
времени. В следующих разделах мы рассмотрим порознь ошибки, возникающие в
результате квантования и при взятии выборок.
, и определяется ошибками квантования,
погрешностями аналого-цифрового преобразования и ошибками, возникающими при
взятии выборок, вдобавок к погрешностям в задании точек дискретизации на оси
времени. В следующих разделах мы рассмотрим порознь ошибки, возникающие в
результате квантования и при взятии выборок.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.