Используя соотношения (3.56) и выражения (3.54) видим, что при главных колебаниях имеют место соотношения
 (3.57)
(3.57)
Координаты ξ1 и ξ2 принятые в качестве обобщенных координат, называются главными, или нормальными координатами. Для них система дифференциальных уравнений распадается на два независимых уравнения
![]() ,
, ![]() (3.58)
(3.58)
Формы колебаний, соответствующие главным координатам, обладают свойством, называемым ортогональностью. Составим выражение
![]() ,
,
где (х1, θ1) и (x2, θ2) — значения координат x, θ, соответствующие главным колебаниям.
На основании (3.57) можем написать
Легко видеть, что выражение в квадратных скобках равно нулю, так как из свойства квадратного уравнения (3.51)
![]() .
.
Откуда ![]()
и, следовательно,
![]() , (3.59)
, (3.59)
что выражает свойство ортогональности форм главных колебаний.
3.8. Связанные собственные и вынужденные колебания
систем со многими степенями свободы.
Динамические характеристики простейших
механической системы и ее элементов
В подразделе 3.7 были описаны некоторые общие свойства, характеризующие связанность колебаний на примере системы, с двумя степенями свободы. При определении частот и форм связанных собственных колебаний систем с большим числом степеней свободы общие классические методы, основанные на составлении частотных уравнений, становятся громоздкими и не дают возможности легко получить практические результаты.
Для анализа таких систем в настоящее время используются специальные, достаточно эффективные методы. К таким методам относится метод, основанный на применении импеданса и адмитанса. При применении этих методов сложная колебательная система расчленяется на ряд более простых или простейших, для каждой из которых определяется динамическая характеристика — импеданс или адмитанс, а затем с помощью этих характеристик производится наращивание-присоединение одной системы к другой до тех пор, пока не будет составлена вся система полностью.
Рассмотрим динамические характеристики механической системы, связанные с действием на нее обобщенного гармонического возбуждения, которое характеризуется зависимостями силы и скорости от времени
P = P0 ejωt, V = V0ejωt (3.60)
Представим оба вида возбуждения, которые можно характеризовать как силовое и кинематическое возбуждение. В первом из них задана сила с фиксированной амплитудой, во втором — смещение с постоянной амплитудой скорости.
Рассмотрим системы, состоящие из отдельных элементов: рис. 3.39, а — масса т, рис. 3.39, б — элемент с трением, коэффициент rкоторого пропорционален скорости, рис. 3.39, в — упругий элемент с коэффициентомжесткости с. При возбуждении гармонических колебаний этих элементов имеются для них соответственно динамические характеристики —импеданси адмитанс — отношение силы к скорости и наоборот:
 |
Рис. 3.39. Масса, элемент с трением и упругость
 . (3.61)
. (3.61)
Простые зависимости (3.30, 3.31), которые сводятся к прямой и обратной пропорциональности и к константе, легко представить в логарифмическом масштабе в виде прямых линий (рис. 3.40, а, б, в).
Обобщенное кинематическое возбуждение — это такое возбуждение
пары точек системы, при котором этим точкам задано движение с относительной скоростью, равной V0ejωt.
 |
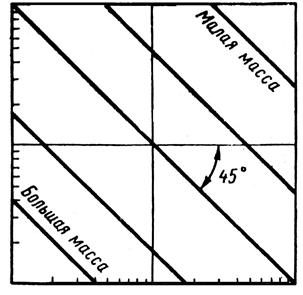

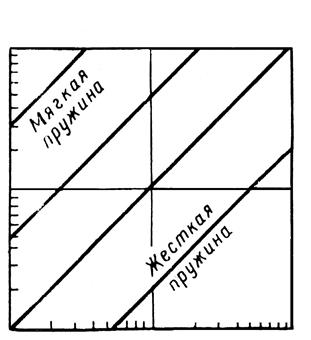
Рис. 3.40. Адмитансы массы, демпфера и пружин
Обобщенным силовым гармоническим - возбуждением системы называется возбуждение какой-либо пары точек системы двумя равными и противоположно направленными силами P0ejωt и -P0ejωt.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.