Окончание таблицы 10
|
24,5 |
25 |
25,5 |
26 |
26,5 |
|
1,005 |
0,991 |
0,986 |
0,984 |
1,000 |
|
2,008 |
2,049 |
2,090 |
2,131 |
2,172 |
|
0,302 |
0,297 |
0,296 |
0,295 |
0,300 |
По полученным
значениям t и h(t), строим кривую переходного процесса для каждой трапеции, а
для того чтобы найти суммарную характеристику графически используем выражение ![]() .
.
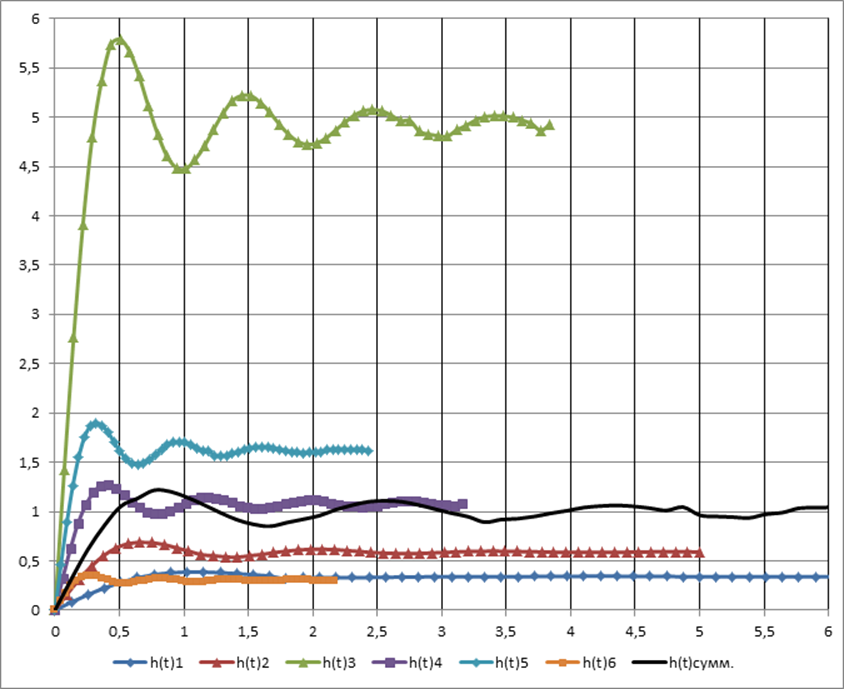
Рисунок 4–переходные характеристики трапеций и суммарная h(t)
1.6 ПОСТРОЕНИЕ ПЕРЕХОДНОГО ПРОЦЕССА В ПП MATHCAD
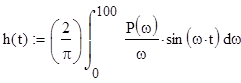
Используя передаточную функцию и вещественную частотную характеристику, строим кривую переходного процесса с помощью ПП MathCAD.
|
|
|
|
|
|
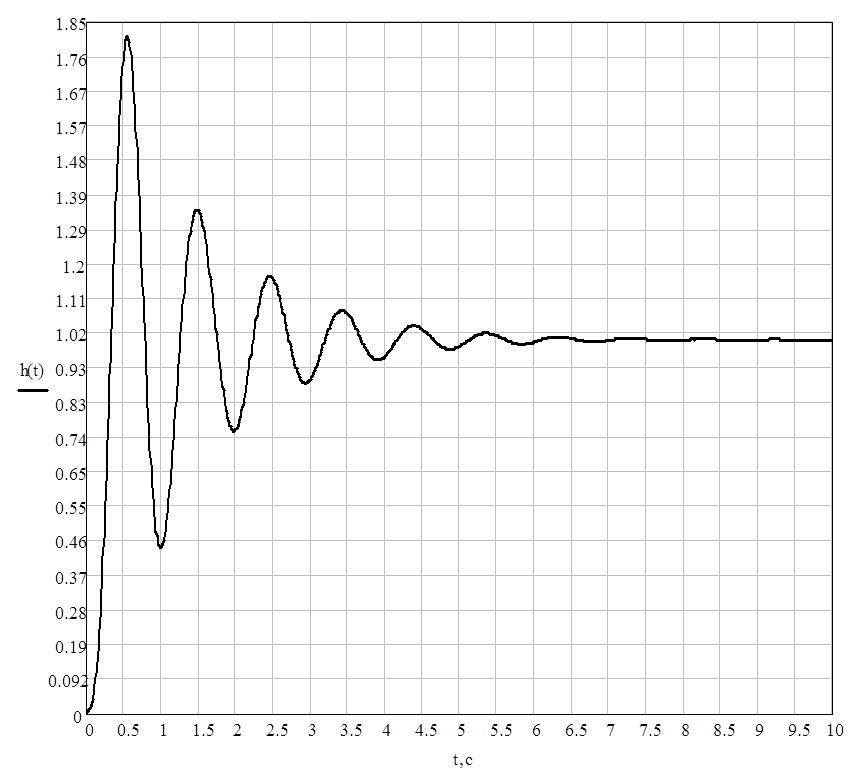
Рисунок 5–Переходная характеристика построенная в ПП MathCAD
1.7 АНАЛИЗ ПОЛУЧЕННЫХ РЕЗУЛЬТАТОВ
Для того чтобы выполнить анализ процесса регулирования используем прямые показатели качества, для удобства и наглядности представления информации данные сводим в таблицу 11.
Таблица 11–показатели качества процесса регулирования
|
Название показателя качества |
Значение |
|
1. Вид переходного процесса |
Колебательный |
|
2. Установившееся значение регулируемой величины |
hуст=1. |
|
3. Максимальное отклонение регулируемой величины или динамическое отклонение |
hmax=1,81. |
|
4. Время достижения первого максимума |
tmax=0,6 с. |
|
5. Время нарастания |
tн=0,3 с. |
|
6. Время регулирования |
tр=6,7 с. |
|
7. Статическая ошибка |
Δ=0 % (так как система астатическая) |
|
8. Перерегулирование |
|
|
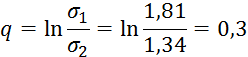
9. Степень затухания |
|
|
10.Логарифмический декремент |
|
Таким образом, на основании вышеприведенных показателей качества можно сделать следующие выводы: качество процесса регулирования к сожалению не удовлетворительное, а именно σ=81%, η=26%, а должно быть σ≤30–40%, η≥70–80%, плюс к этому большое время регулирование переходного процесса. Данные выводы говорят о том, что при нормальных условиях работы система будет показывать плохое качество регулирования процесса, а именно скорости вращения вала двигателя, следовательно необходимо улучшать качество рассматриваемой АСР, во второй части курсовой работы будет произведен синтез АСР методом логарифмических частотных характеристик (ЛЧХ), а также будет представлен расчет корректирующего устройства и выбраны конкретные RC–цепочки реализующие рассчитанное корректирующее устройство.
2. СИНТЕЗ АСР МЕТОДОМ ЛОГАРИФМИЧЕСКИХ ЧАСТОТНЫХ ХАРАКТЕРИСТИК
Синтезом автоматической системы называют процедуру определения структуры и параметров системы по заданным показателям качества. Синтез является важнейшим этапов проектирования и конструирования системы. В общем случае при проектировании системы необходимо определить алгоритмическую и функциональную структуру, то есть решить задачу полного синтеза.
В данной работе, поскольку система уже есть мы будем определять алгоритмическую структуру. Для того чтобы скорректировать АСР воспользуемся методом логарифмических частотных характеристик. Этот метод синтеза основан на соответствии между логарифмическими частотными характеристиками разомкнутой системы и её статическими и динамическими свойствами в замкнутом состоянии.
Корректирующее устройство будем применять – последовательное, это обусловлено рядом достоинств и меньшим числом недостатков по сравнению с параллельным корректирующим устройством.
Учтем также и то, что в синтезе методом логарифмических частотных характеристик достаточно рассматривать логарифмическую амплитудную частотную характеристику (ЛАЧХ) без логарифмической фазовой частотной характеристики (ЛФЧХ), если система минимально–фазовая, то есть не имеет положительных нулей и полюсов.
2.1 РАСЧЕТ И ПОСТРОЕНИЕ ЛАЧХ ИСХОДНОЙ СИСТЕМЫ
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.