![]()
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
![]()
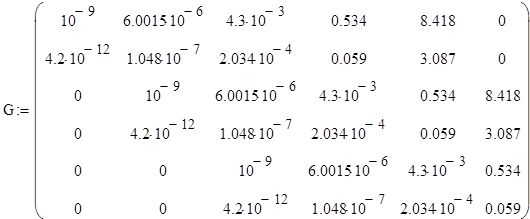
Как видно из вышеприведенных формул, главный определитель Гурвица и все его диагональные миноры больше нуля, это означает что система устойчивая, далее мы построим переходной процесс системы, чтобы определить показатели качества и сравнить их с показателями некорректированной системы (рисунок 19).
2.6 АНАЛИЗ РЕЗУЛЬТАТОВ
Найденные показатели качества сведем в таблицу для наглядности изменений системы после корректировки и составим таблицу таким образом, чтобы в ней были представлены, значения показателей до корректировки и значения после корректировки (таблица 12).
Таблица 12–Показатели качества до и после коррекции системы
|
Название показателя качества |
Значение для некорректированной системы |
Значение для скорректированной системы |
|
|
1. Вид переходного процесса |
Колебательный |
||
|
2. Установившееся значение регулируемой величины |
hуст=1. |
hуст=1. |
|
|
3. Максимальное отклонение регулируемой величины или динамическое отклонение |
hmax=1,81. |
hmax=1,25. |
|
|
4. Время достижения первого максимума |
tmax=0,6 c. |
tmax=0,36 с. |
|
|
5. Время нарастания |
tн=0,3 c. |
tн=0,25 c. |
|
|
6. Время регулирования |
tр=6,7 c. |
tр=1,7 c. |
|
|
7. Статическая ошибка |
Δ=0%, так как система астатическая |
||
|
8. Перерегулирование |
σ=81 % |
σ=25 % |
|
Таким образом, мы видим, что качество системы улучшилось, об это говорят показатели качества, а именно уменьшилось время регулирования, время нарастания и перерегулирование. Можно утверждать, что система при данном уровне качества будет работать стабильно, но мы также видим существенный недостаток включения корректирующего устройства, это увеличение порядка системы, был пятый, а стал девятый, это может повлечь усложнение последующего расчета параметров системы, но в данном случае, когда расчет мы вели с использованием ЭВМ и специальных программных продуктов, этот недостаток несущественен, однако в этом случае может играть роль выбор метода исследования системы. Главную задачу, а именно улучшения качества и работоспособности системы мы выполнили.
ЗАКЛЮЧЕНИЕ
Несмотря на все многообразие методов, и способов исследования линейных АСР в данной работе были использованы именно: исследование устойчивости систем по критерию Гурвица и синтез систем методом логарифмических частотных характеристик. Это было сделано не случайно, критерий Гурвица не осложняет исследование исключение составляет порядок системы, но в данном случае мы использовали ЭВМ, поэтому проблем не возникло, что касается синтеза методом ЛЧХ то этот способ тоже достаточно прост, исключения составляют некоторые нюансы характерные для отдельных систем. Также было выбрано последовательное корректирующее устройство, за счет своих достоинств, а именно:
· простота расчета;
· простота и удобство вычисления;
· расширения полосы пропускания.
Итогом всей проделанной работы явилось улучшенное качество системы, что говорит о верном пути решения задачи синтеза АСР.
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
1. Теория автоматического управления: метод. Указания к курсовой работе для студентов специальности 220301 (210200) «Автоматизация технологических процессов и производств (по отраслям)» [Текст] / сост. В.А. Осипова; ГУЦМиЗ. – Красноярск, 2005. – 28 с.
2. Геращенко, Г, В. Справочник по обмоточным данным электрических машин и аппаратов [Текст] / Г. В. Геращенко, П. В. Гембель. 2–е изд., испр. и доп. Киев: Техника, 1972. 536 с.
3. Расчет автоматических систем [Текст] / А. В. Фатеев, А. А. Вавилов, Л. П. Смольников [и др.]; под ред. А. В. Фатеева. М.: Высш. шк., 1973.336 с.
4. Хлыпало, Е. И. Нелинейные системы автоматического регулирования: Расчет и проектирование [Текст] / Е. И. Хлыпало; под ред. Е. П. Попова. Л.: Энергия, 1967. 452 с.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.