Этот интеграл является стандартным, решением которого является выражение:
 ,
,
где:
 ;
;
В итоге получаем:
 ;
;
Подставляя численные значения, получаем:
![]()
![]()
Дисперсия флуктуационной ошибки ![]() [В2].
[В2].
5. Результаты экспериментальных исследований.
В этом разделе будет произведена разработка системы MATLAB моделей замкнутых линейных систем управления с отрицательной обратной связью на основе пакета Simulink.
5.1. Исследование статической системы.
5.1.1. Исследование статической системы при постоянном уровне полезного сигнала.
При воздействии на вход системы полезного сигнала в виде ступенчатой функции сформируем временные диаграммы входного сигнала, выходного сигнала, ошибки работы системы. Схема приведена на рис. 15:
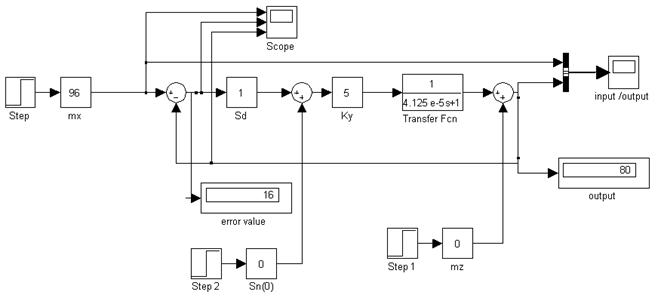
Рис. 15. Simulink – модель статической системы (полезный сигнал в виде ступенчатой функции).
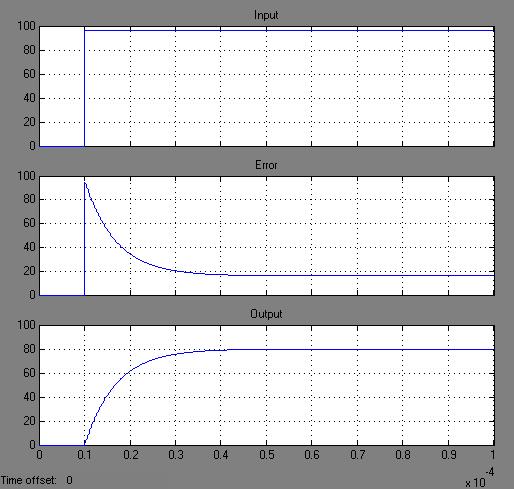
Рис. 16. Процессы в статической системе при полезном сигнале в виде ступенчатой функции.
На основе собранной модели определим количественную зависимость установившейся ошибки me работы системы от величины входного сигнала mx при нескольких значениях коэффициента усиления системы Ky. Результаты измерений занесем в таблицу:
Таблица 1. Ошибка me при воздействии полезного сигнала mx.
|
mx, мВ |
0 |
50 |
100 |
150 |
200 |
|
|
me, мВ |
Ky = 1 |
0 |
25.32 |
50.64 |
75.95 |
101.3 |
|
Ky = 5 |
0 |
8.333 |
16.67 |
25 |
33.33 |
|
|
Ky = 10 |
0 |
4.545 |
9.091 |
13.64 |
18.18 |
|
Данные, занесенные в таблицу, представим на одних осях координат в виде семейства графиков me(mx) при различных значениях Ky:
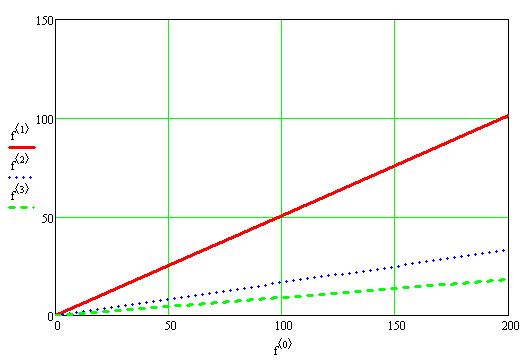
Рис. 17. Семейство графиков me(mx) при различных значениях Ky.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.