



















Идентификация объекта управления
2.1 Идентификация объекта апериодическим звеном первого порядка
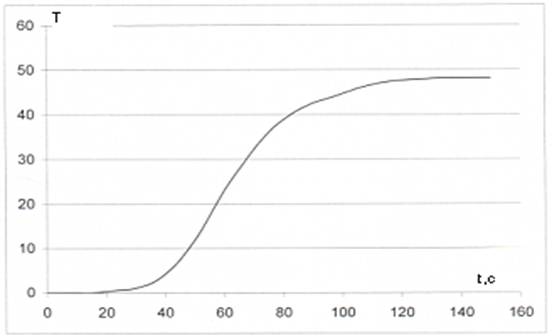
Рисунок 1. Экспериментальная характеристика объекта
![]() - передаточная
функция объекта
- передаточная
функция объекта
В данном пункте используем 2 метод идентификации:
Для этого:
1. Находим точку перегиба на графике.
2. Проводим касательную через точку перегиба.
3. Находим участок запаздывания:
![]() = 18 мин. (транспортное запаздывание)
= 18 мин. (транспортное запаздывание)
![]() = 21 мин. (переходное запаздывание)
= 21 мин. (переходное запаздывание)
Полный участок запаздывания: ![]() 39
мин.
39
мин.
4.Постоянную времени Т находим следующим образом:
4.1 Находим точку на графике = 0,63*hycт(t) = 0,63*48 = 30,24
![]() Находим параметр А
= 67,6 мин.
Находим параметр А
= 67,6 мин.
4.2 Постоянная времени: Т=А-т=б7,б-39=28б мин
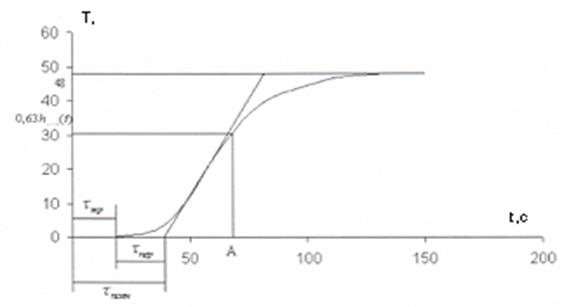
Рисунок 2. Экспериментальная характеристика
Определим коэффициент усиления объекта:
![]() ; при
; при ![]() =1
=1
Передаточная функция объекта имеет вид:
![]()
С помощью программы ModelCad, введя параметры передаточной функции, найденной данным методом, построим расчетную переходную характеристику и наложим на экспериментальную:
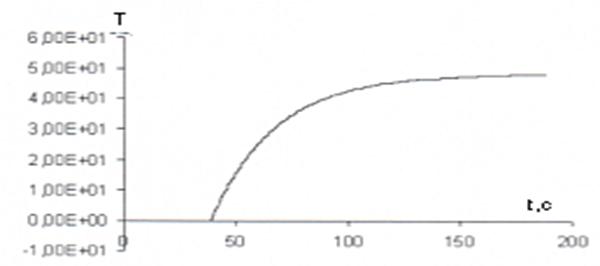
Рисунок 3. Расчетная характеристика
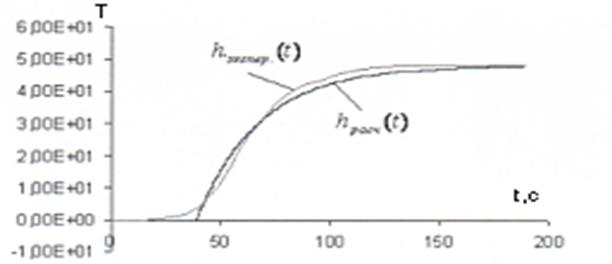
Рисунок 4. Совмещение экспериментальной и расчётной характеристики в одной координатной плоскости
Погрешность идентификации определим по формуле:
 ;
;
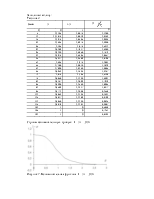
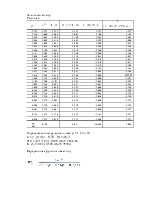
Заполним таблицу:
Таблица 1
|
t |
h(t)экс |
h(t)расч |
|
|
0 |
0 |
0 |
0 |
|
50 |
10,8 |
15,3 |
9,4 |
|
52 |
15,4 |
17,5 |
4,3 |
|
60 |
23 |
24,9 |
3,9 |
|
70 |
33,2 |
31,8 |
2,9 |
|
80 |
39 |
36,5 |
5,2 |
|
90 |
42,5 |
39,9 |
5,4 |
|
100 |
44,2 |
42,3 |
3,9 |
|
110 |
46,3 |
43,9 |
5 |
|
120 |
47,5 |
45,2 |
4,8 |
|
130 |
47,9 |
46 |
3,9 |
|
140 |
48 |
46,6 |
2,9 |
|
150 |
48 |
47 |
2 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.