в инженерных
расчетах допускается ошибка аппроксимации меньше 5%. В данном методе получили
передаточную функцию вида: ![]() с
ошибкой
с
ошибкой ![]() %
%
Следовательно, этот метод не
подходит для данной кривой, так как ![]() >5%
>5%
Аппроксимация переходной характеристики объекта методом интегральных площадей
Расчет производим методом интегральных площадей в следующей последовательности:
1. Выделение на экспериментальной кривой участка транспортного запаздывания.
2.Выбор ![]() t интервала
разбиения кривой
t интервала
разбиения кривой
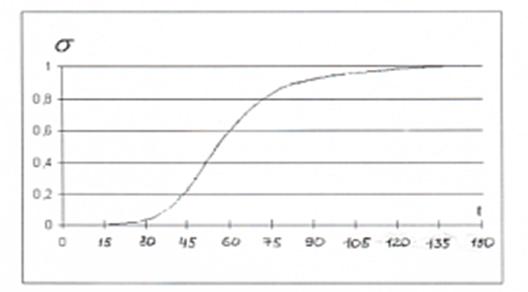
3.Строим переходную характеристику в безразмерном виде (кривая разгона
![]() (t)),
где
(t)),
где ![]()
4. Для этого значения h(![]() t) в конце каждого интервала
t) в конце каждого интервала ![]() t делим на hmах (t), получившееся значение
t делим на hmах (t), получившееся значение ![]() (t)
заносим в таблицу 3. Подсчитываем сумму
(t)
заносим в таблицу 3. Подсчитываем сумму
![]()
5.Определяем площадь F![]() по
формуле:
по
формуле:
![]()
6.
Строим вспомогательную функцию (l-![]() )=f(
)=f(![]() )
,где
)
,где ![]() -безразмерное время,
-безразмерное время,
7. Заполняем таблицу 4.
8. Подсчитываем сумму столбцов.
9. Определяем интегральные площади:
F![]() =
=
F![]() =
=
10. Выбираем структуру передаточной функции, т.к в момент времени t=0,
![]() , то передаточную функцию выбираем вида:
, то передаточную функцию выбираем вида:
![]()
Где a![]() =F
=F![]()
a![]() =F
=F![]()
a![]() =F
=F![]()
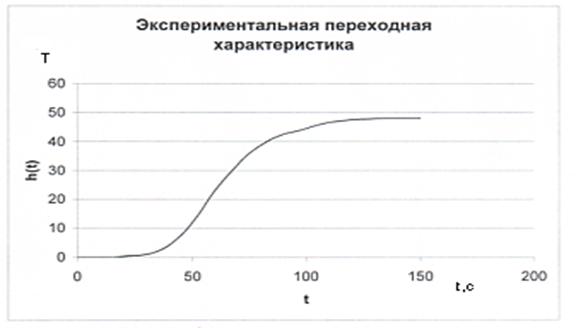
Рисунок 5. Экспериментальная характеристика
Построим экспериментальную характеристику без участка чистого запаздывания:
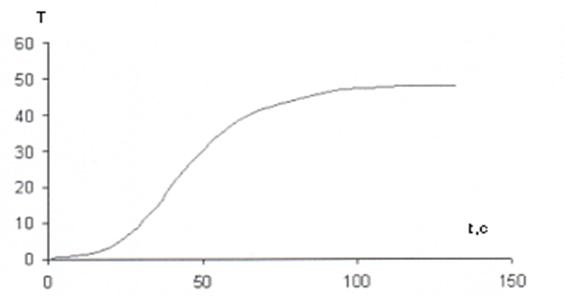
Рисунок 6. Экспериментальная кривая без участка чистого запаздывания
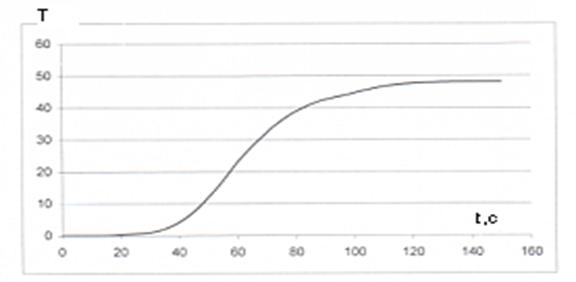
Рисунок 5. Экспериментальная характеристика
Построим экспериментальную характеристику без участка чистого запаздывания
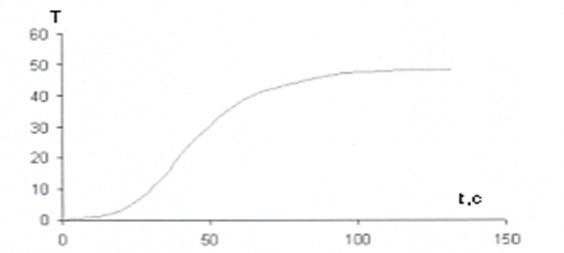
Рисунок 6. Экспериментальная кривая без участка чистого запаздывания
|
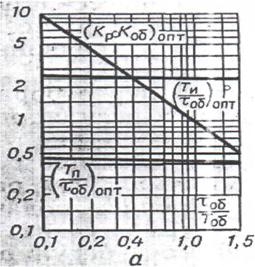
4. Определение настроечных параметров регулятора 4.1 Метод номограмм В данном методе параметры регулятора выбираются по номограмме для ПИД-регулятора (апериодический процесс): |
Рисунок 7. Нормированная характеристика (в безразмерном виде)
|
|
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.